542a0b19b18f9-thumb.jpg (11.19 KB, 下载次数: 337)
下载附件 保存到相册
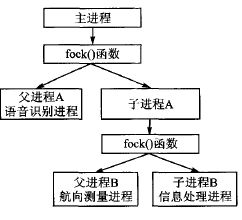
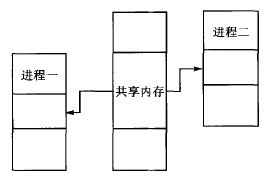
基于嵌入式Linux的移动机器人控制系统
2014-10-10 07:14 上传
542a0b19ab832-thumb.jpg (10.74 KB, 下载次数: 314)
542a0b5f6d0f9-thumb.jpg (6.3 KB, 下载次数: 331)
542a0b5f82749-thumb.jpg (15.25 KB, 下载次数: 315)
542a0b5f91dfa-thumb.jpg (14.63 KB, 下载次数: 333)
542a0b99958ef-thumb.jpg (10.04 KB, 下载次数: 316)
542a0becbf094-thumb.jpg (8.51 KB, 下载次数: 323)
542a0becba1b4-thumb.jpg (11.75 KB, 下载次数: 310)
542a0becbf09c-thumb.jpg (13.04 KB, 下载次数: 312)
542a0becab1e8-thumb.jpg (16.33 KB, 下载次数: 320)