5403cd730ed63-thumb.jpg (9.71 KB, 下载次数: 346)
下载附件 保存到相册
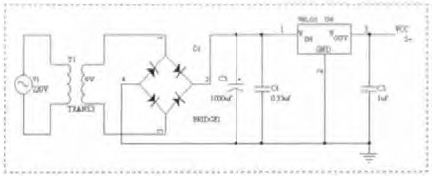
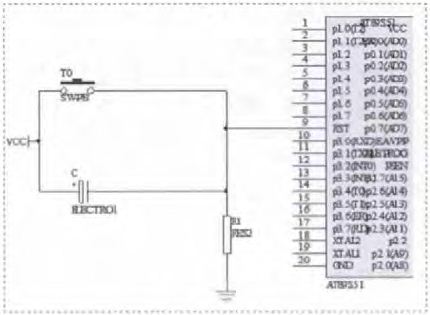
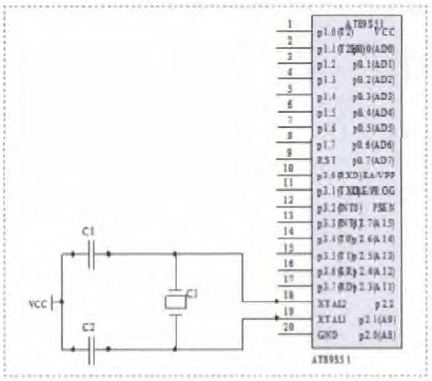
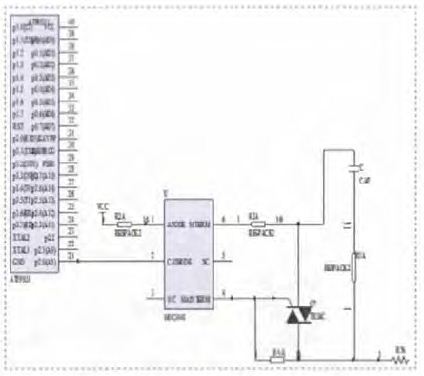
基于AT89S51单片机的PID温度控制系统设计
2014-10-10 07:14 上传
5403cd98ac904-thumb.jpg (18.1 KB, 下载次数: 355)
5403cd98caba6-thumb.jpg (20.11 KB, 下载次数: 359)
5403cd9895fd6-thumb.jpg (17.65 KB, 下载次数: 352)
5403cdeb9c5cd-thumb.jpg (25.11 KB, 下载次数: 359)
5403ce153044b-thumb.jpg (10.48 KB, 下载次数: 357)