5337e8485149d-thumb.jpg (10.01 KB, 下载次数: 346)
下载附件 保存到相册
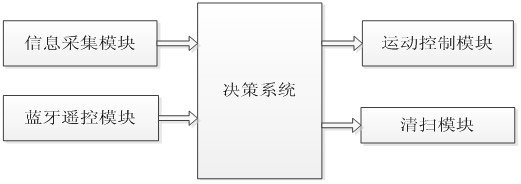
基于SLH89F5162的智能清洁机器人
2014-10-10 07:17 上传
5337e89f83369-thumb.jpg (21.58 KB, 下载次数: 343)