52f4b06ca267f-thumb.jpg (15.16 KB, 下载次数: 358)
下载附件 保存到相册
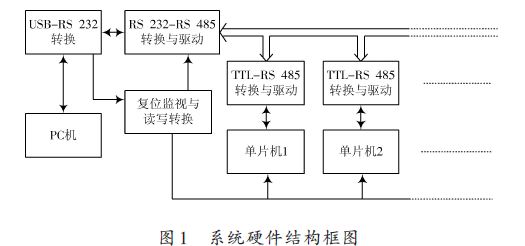
PC机与单片机多机主从互通的实现
2014-10-10 07:17 上传
52f4b0a5ef381-thumb.jpg (7.24 KB, 下载次数: 355)
52f4b08b0a348-thumb.jpg (20.14 KB, 下载次数: 342)