50b8c0e834647-thumb.jpg (8.02 KB, 下载次数: 257)
下载附件 保存到相册
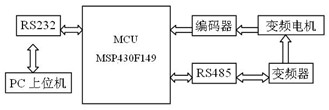
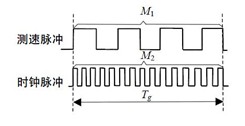
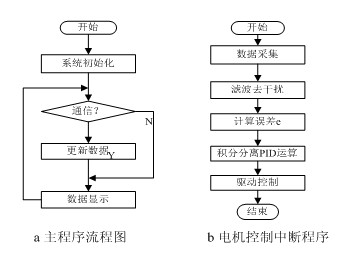
基于MSP430的变频伺服系统设计
2014-10-10 08:10 上传
50b8c0e8348a7-thumb.jpg (3.07 KB, 下载次数: 255)
50b8c0e837676-thumb.jpg (5.84 KB, 下载次数: 266)
50b8c0e8398ed-thumb.jpg (14.91 KB, 下载次数: 261)
50b8c0e83b32a-thumb.jpg (1.46 KB, 下载次数: 264)
50b8c0e83dd72-thumb.jpg (1.46 KB, 下载次数: 255)
50b8c0e83edf6-thumb.jpg (7.64 KB, 下载次数: 258)