50b8c0b6e7dc8-thumb.jpg (11.25 KB, 下载次数: 202)
下载附件 保存到相册
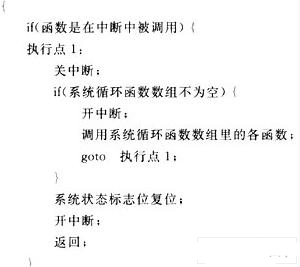
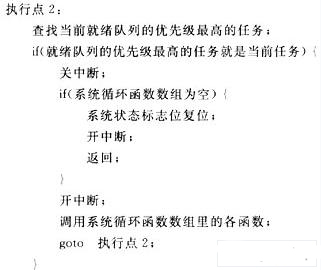
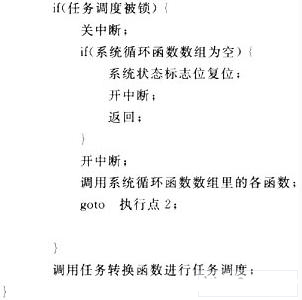
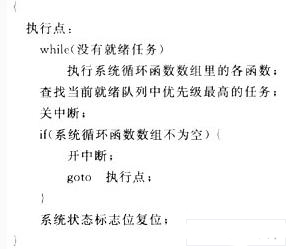
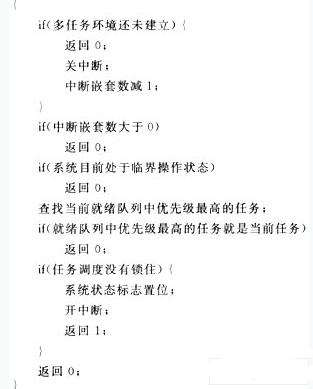
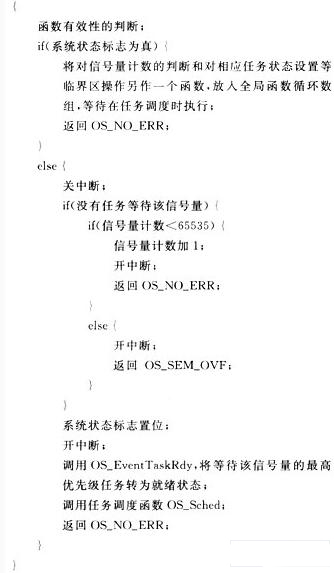
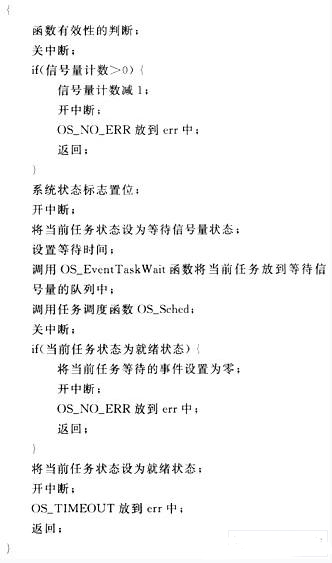
缩短μC/OS-II实时内核中断关闭时间的方法设计
2014-10-10 08:16 上传
50b8c0b6e94c1-thumb.jpg (14.15 KB, 下载次数: 209)
50b8c0b6ec7fd-thumb.jpg (11.83 KB, 下载次数: 206)
50b8c0b6ef864-thumb.jpg (11.66 KB, 下载次数: 197)
50b8c0b6f19cc-thumb.jpg (16.43 KB, 下载次数: 195)
50b8c0b7002d4-thumb.jpg (13.83 KB, 下载次数: 202)
50b8c0b703a06-thumb.jpg (13.96 KB, 下载次数: 206)