50b8c09b1be7c-thumb.jpg (9.64 KB, 下载次数: 259)
下载附件 保存到相册
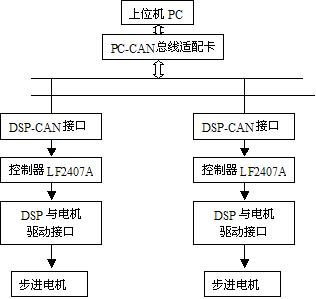
DSP-LF2407A和CAN总线组成的分布式电机控制系统
2014-10-10 08:18 上传
50b8c09b1c1aa-thumb.jpg (18.69 KB, 下载次数: 270)
50b8c09b1c44f-thumb.jpg (18.55 KB, 下载次数: 277)
50b8c09b1c7d2-thumb.jpg (16.52 KB, 下载次数: 258)
50b8c09b1caa9-thumb.jpg (5.66 KB, 下载次数: 267)
50b8c09b1cdcd-thumb.jpg (20.88 KB, 下载次数: 276)