50b8c7eb8dd77.jpg (16.02 KB, 下载次数: 218)
下载附件 保存到相册
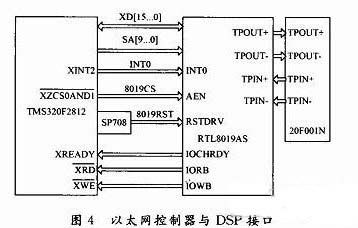
基于DSP/FPGA的以太网控制器的运动控制器设计
2014-10-10 08:21 上传
50b8c7eb93e58.jpg (16.56 KB, 下载次数: 218)
50b8c7eb9c05e.jpg (13.06 KB, 下载次数: 213)
50b8c7eba038e.jpg (18.13 KB, 下载次数: 216)
50b8c7eba628e.jpg (9.48 KB, 下载次数: 218)