DCS算法在进行运动估计匹配运算时,有三种可能的情况:
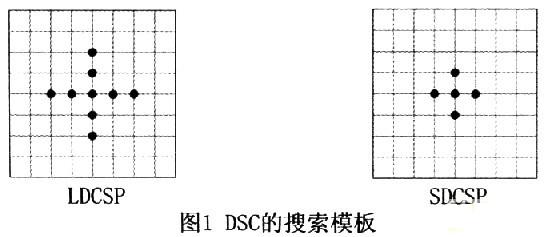
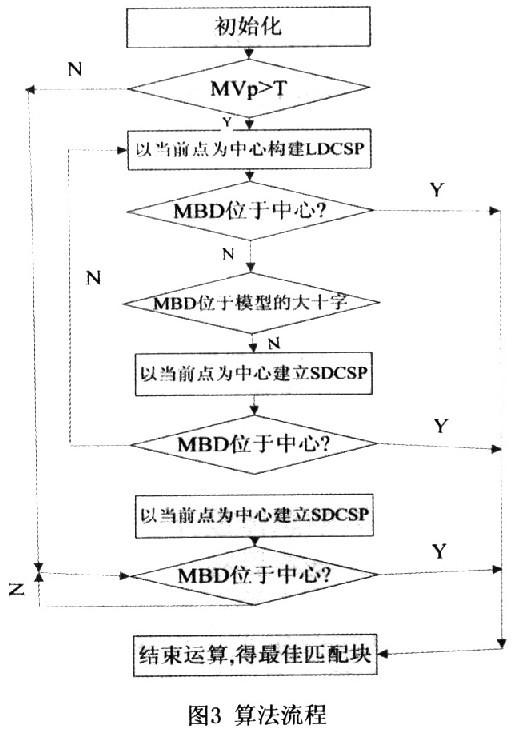
(1)若MBD点位于LDCSP中心位置,说明图像是静止的,DCS算法一步结束;
(2)若MBD点位于LDCSP小十字位置,说明图像的运动较小,则在此基础上按照SDCSP模板反复进行交叉搜索。
(3)若MBD点位于LDCSP大十字位置,说明图像的运动较大,则在此基础上按照LDCSP模板反复进行交叉搜索。
由此可以看出,DCS算法的优点是,可以根据图像的运动类型(如上述三种情况),白适应选择下一步相应的搜索模板,使搜索与图像内容有关(基于内容的搜索),从而得到较好的搜索效果;DCS算法的搜索并不一定要经历模板由大到小的必然过程,有时一步即可完成搜索;用DCS搜索时,十字形模板对应于实际的运动矢量分布,交叉形模板则有准确性“聚焦”特性,这从本质上体现了DCS是粗定位和准确定位的有效结合。 <Script type=text/javascript> function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w < m){return;} else{ var h = $(Id).height; $(Id).height = parseInt(h*m/w); $(Id).width = m; } } window.onload = function() { var Imgs = $("content").getElementsByTagName("img"); var i=0; for(;i
视频图像的运动矢量大部分为零矢量或运动很小的矢量。运动矢量为零的块称为静止块;运动矢量很小的块(以搜索窗口中心为圆心,两像素为半径的圆内)称为准静止块:而其他的称为运动块。如果有超过80%运动矢量很小的块可被看作静止或准静止块。因此,可设一个阀值T,当运动矢量的值小于T时,可用SDCSP搜索法直接进行精确定位,找出最优点;当运动矢量的值大于T时,可用LDCSP搜索算法找出最优点。
运动矢量空间域的预测方式有运动矢量中值预测、空间域的上层块模式运动矢量;在时间域的预测方式有前帧对应块运动矢量预测和时间域的邻近参考帧运动矢量预测。本文采用运动矢量中值预测方式。根据与当前E块相邻的左边A块,上边B块和右上边C块的运动矢量,取中值作为当前块的预测运动矢量。如图2所示。
type=text/javascript> function ImgZoom(Id)//重新设置图片大小 防止撑破表格 { var w = $(Id).width; var m = 650; if(w < m){return;} else{ var h = $(Id).height; $(Id).height = parseInt(h*m/w); $(Id).width = m; } } window.onload = function() { var Imgs = $("content").getElementsByTagName("img"); var i=0; for(;i4 实验结果及说明
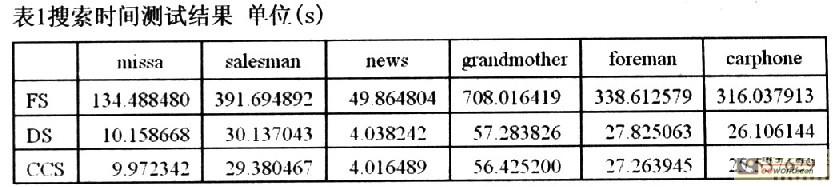
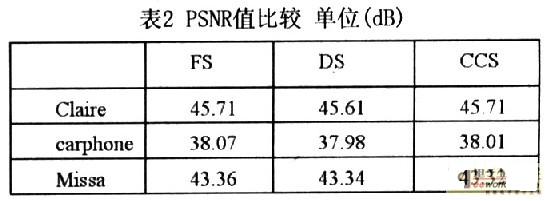
用搜索时间和PSNR值两个指标来验证DCS的性能。本节实验用到的所有视频文件均为QCIF(Quartet commonintermediate format)格式。实验以主频1.8GHz的PC机上运行的VisualC++6.0为平台。测试对象为:missa、salesman、news、grandmother、foreman、carphone、claire,搜索范围为16×16的矩形框,量化范围为2~12,测试序列中每帧图像的大小为176×144。 4.1 搜索时间的比较
为了时间测试的准确性,测试时采用的是VC++提供的两个精确时间函数:QueryPerformanceFrequency()和OuerPerformanceCounter()精度对标准测试序列missa、salesman、news、grandmother、foreman、carphone进行精确测定,得表1(数据均为三次测量所求得的平均值)。