51ef7cfa064b5-thumb.jpg (21.7 KB, 下载次数: 297)
下载附件 保存到相册
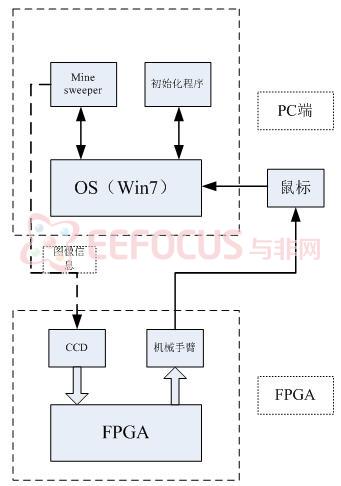
图1.1 系统结构图
2014-10-12 16:21 上传
51ef7cfa0c0dd-thumb.jpg (23.77 KB, 下载次数: 285)
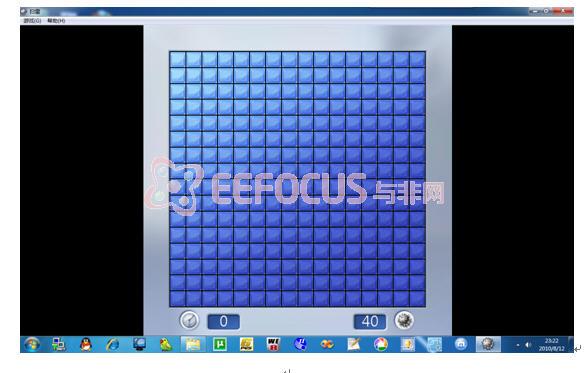
图2.3 原始图像
51ef7cfa0c230-thumb.jpg (19.96 KB, 下载次数: 289)
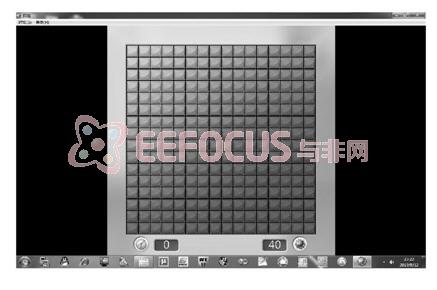
图2.4 灰度图像
51ef7cfa0c935-thumb.jpg (22.17 KB, 下载次数: 287)
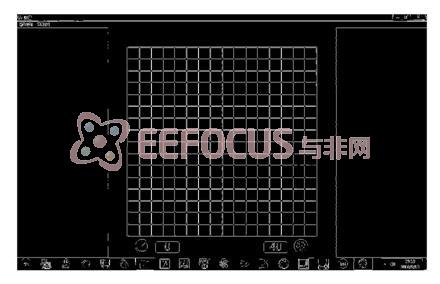
图2.5 边缘检测结果图
51ef7cfa1cdf1-thumb.jpg (19.44 KB, 下载次数: 285)
图2.6 边缘检测结果局部放大图
51ef7cfa213c4-thumb.jpg (1.72 KB, 下载次数: 285)
基于FPGA的扫雷机器人软硬件设计
51ef7cfa2abaa-thumb.jpg (1.6 KB, 下载次数: 289)
51ef7cfa2be0f-thumb.jpg (1.73 KB, 下载次数: 289)
51ef7cfa3473d-thumb.jpg (1.35 KB, 下载次数: 286)
51ef7cfa3c48f-thumb.jpg (2.07 KB, 下载次数: 280)
51ef7cfa3c019-thumb.jpg (2.09 KB, 下载次数: 278)
51ef7cfa45eb0-thumb.jpg (27.64 KB, 下载次数: 298)