518494ad5451f-thumb.jpg (10.38 KB, 下载次数: 118)
下载附件 保存到相册
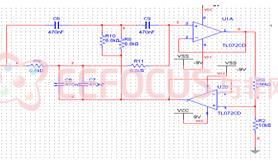
图5 陷波电路设计
2014-10-12 21:50 上传
518494ad53609-thumb.jpg (8.58 KB, 下载次数: 120)
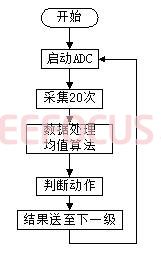
图6 信号采集软件流程图
518494ad6d558-thumb.jpg (19.03 KB, 下载次数: 122)
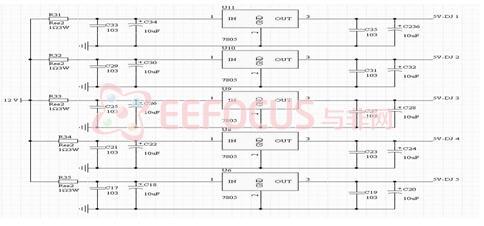
图9 机械手电路设计