50bb450707a78-thumb.jpg (15.64 KB, 下载次数: 126)
下载附件 保存到相册
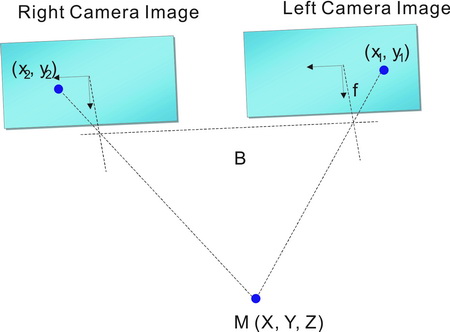
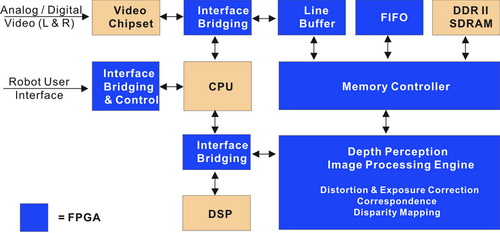
用FPGA实现低成本实时深度感知
2015-4-27 17:34 上传
50bb450709e31-thumb.jpg (25.72 KB, 下载次数: 132)