50b8c0c383073-thumb.jpg (8.9 KB, 下载次数: 129)
下载附件 保存到相册
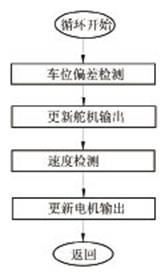
基于S12的光电式自动寻迹车的设计
2015-4-27 20:03 上传
50b8c0c3857eb-thumb.jpg (11.76 KB, 下载次数: 131)
50b8c0c388905-thumb.jpg (6.26 KB, 下载次数: 121)
50b8c0c38a4ba-thumb.jpg (7.48 KB, 下载次数: 124)
50b8c0c38dda5-thumb.jpg (1.65 KB, 下载次数: 134)
50b8c0c3902a2-thumb.jpg (4.14 KB, 下载次数: 124)
50b8c0c394342-thumb.jpg (1.4 KB, 下载次数: 132)
50b8c0c3946c6-thumb.jpg (2.56 KB, 下载次数: 124)