50bb450bdd44d-thumb.jpg (26.05 KB, 下载次数: 129)
下载附件 保存到相册
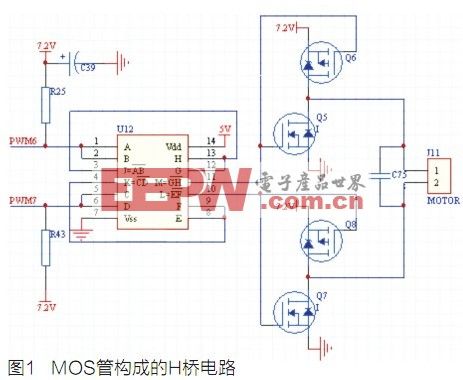
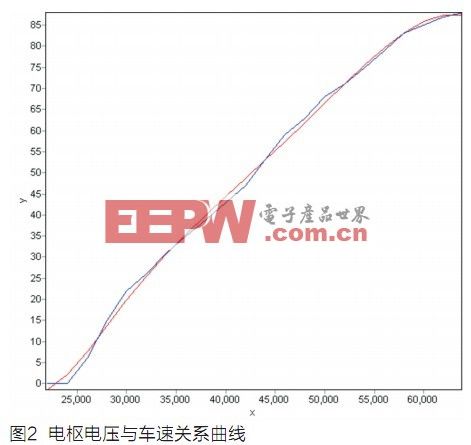
智能车速度控制系统设计与实现
2015-4-27 20:33 上传
50bb450bdd9e6-thumb.jpg (16.24 KB, 下载次数: 144)