50bb44ff76b1a-thumb.jpg (29.84 KB, 下载次数: 173)
下载附件 保存到相册
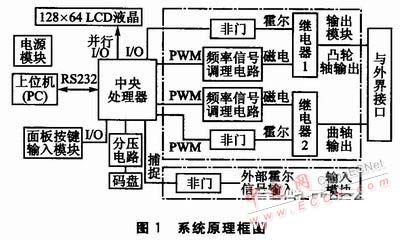
发动机转速信号模拟器设计方案
2015-4-27 20:37 上传
50bb44ff76fbf-thumb.jpg (16.84 KB, 下载次数: 158)
50bb44ff7734a-thumb.jpg (8.77 KB, 下载次数: 167)
50bb44ff779ef-thumb.jpg (22.5 KB, 下载次数: 163)
50bb44ff7762f-thumb.jpg (7.69 KB, 下载次数: 161)
50bb44ff77df8-thumb.jpg (13.48 KB, 下载次数: 167)
50bb44ff781bc-thumb.jpg (30.82 KB, 下载次数: 168)
50bb44ff7856c-thumb.jpg (28.47 KB, 下载次数: 170)
50bb44ff7b71b-thumb.jpg (20.23 KB, 下载次数: 185)