50bb44e31209f-thumb.jpg (10.32 KB, 下载次数: 133)
下载附件 保存到相册
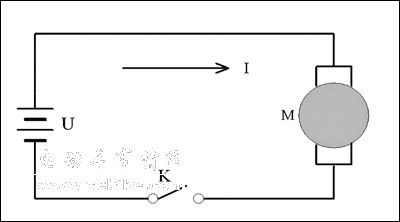
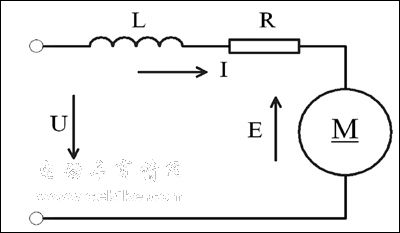
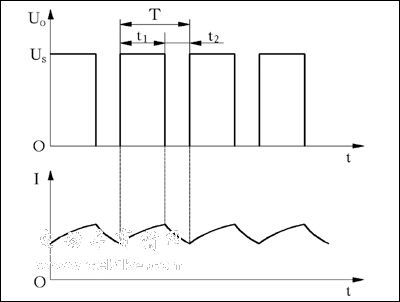
电动自行车控制器的技术原理与设计
2015-4-27 20:43 上传
50bb44e31273a-thumb.jpg (11.35 KB, 下载次数: 123)
50bb44e312cbf-thumb.jpg (14.83 KB, 下载次数: 123)