50bb44e13faa7-thumb.jpg (27.96 KB, 下载次数: 139)
下载附件 保存到相册
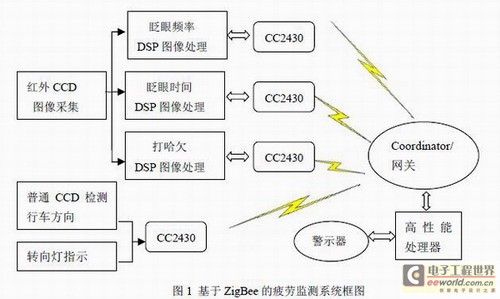
基于ZigBee的疲劳驾驶警示系统的研究与设计
2015-4-27 20:43 上传
50bb44e13cb98-thumb.jpg (14.97 KB, 下载次数: 147)
50bb44e1400d1-thumb.jpg (16.32 KB, 下载次数: 155)
50bb44e1405b2-thumb.jpg (14.54 KB, 下载次数: 147)
50bb44e140a66-thumb.jpg (2.35 KB, 下载次数: 156)