50bc3b723f7f8.jpg (12.1 KB, 下载次数: 143)
下载附件 保存到相册
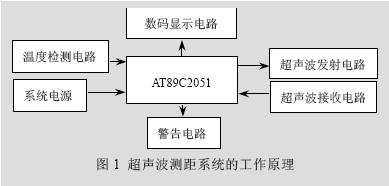
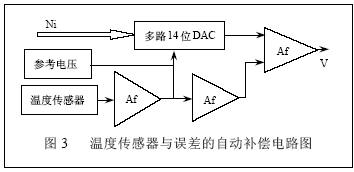
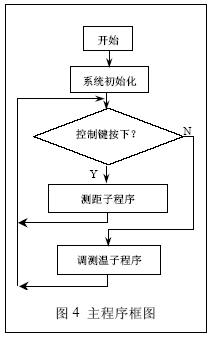
高精度低成本车用超声波传感器的研制
2015-4-27 20:52 上传
50bc3b7243c92.jpg (1.66 KB, 下载次数: 140)
50bc3b724c89e.jpg (3.5 KB, 下载次数: 137)
50bc3b7252a57.jpg (1.59 KB, 下载次数: 149)
50bc3b7258ef1.jpg (5.18 KB, 下载次数: 151)
50bc3b725e173.jpg (1.87 KB, 下载次数: 138)
50bc3b726440b.jpg (3.06 KB, 下载次数: 138)
50bc3b726b295.jpg (17.32 KB, 下载次数: 151)
50bc3b7271300.jpg (12.71 KB, 下载次数: 140)
50bc3b7276a2c.jpg (5.42 KB, 下载次数: 130)
50bc3b727b5d5.jpg (12.85 KB, 下载次数: 139)