50bc375c5887e.jpg (21.19 KB, 下载次数: 152)
下载附件 保存到相册
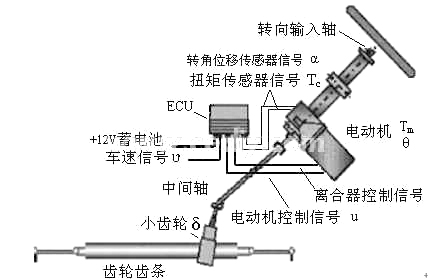
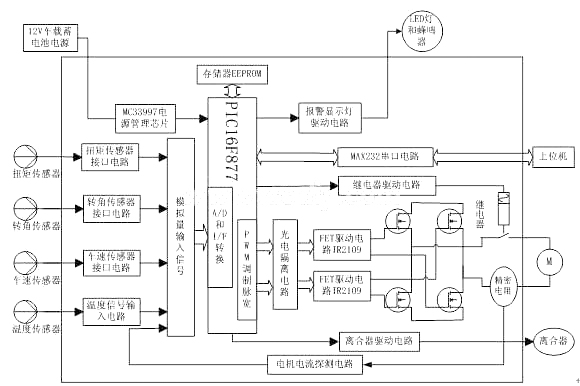
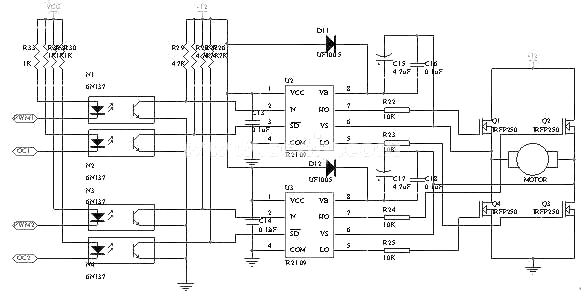
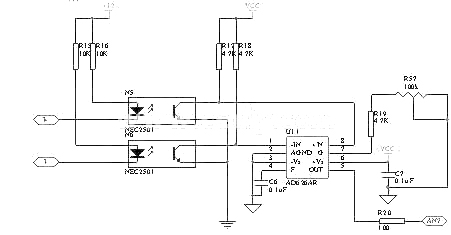
采用PIC16F877的汽车电动助力转向系统
2015-4-27 20:55 上传
50bc375c5ec92.jpg (28.94 KB, 下载次数: 145)
50bc375c6e23e.jpg (24.47 KB, 下载次数: 140)
50bc375c72cee.jpg (14.38 KB, 下载次数: 134)
50bc375c787c1.jpg (9.24 KB, 下载次数: 140)