51289c4165d13-thumb.jpg (8.73 KB, 下载次数: 145)
下载附件 保存到相册
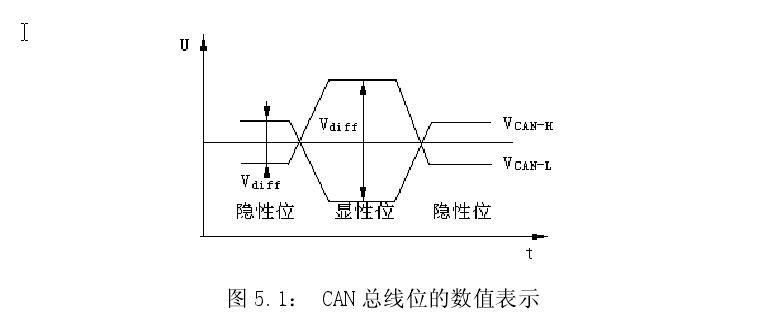
CAN总线的位数值表示
2015-4-27 22:52 上传
51289c4aa804b-thumb.jpg (23.74 KB, 下载次数: 143)
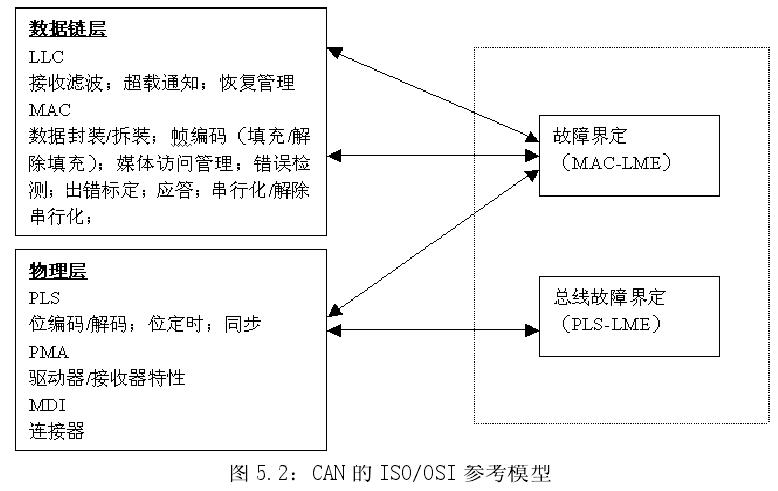
CAN的ISO/OSI参考模型的层结构
51289c4588643-thumb.jpg (20.4 KB, 下载次数: 157)
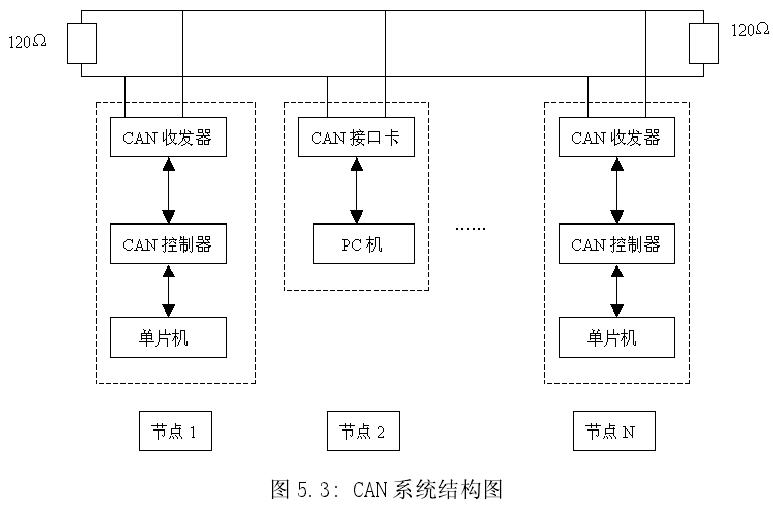
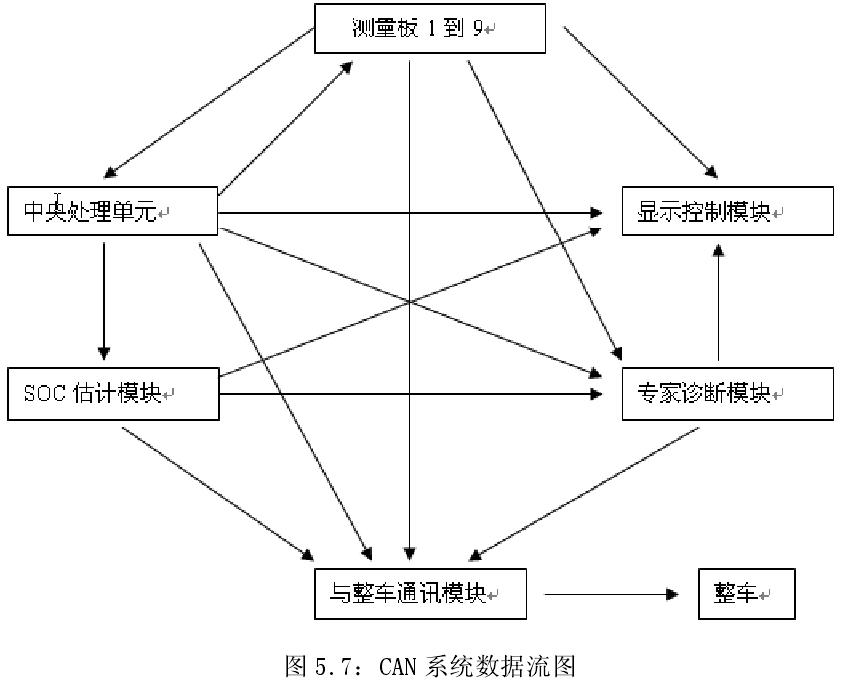
CAN系统结构
51289c45d4891-thumb.jpg (26.31 KB, 下载次数: 158)
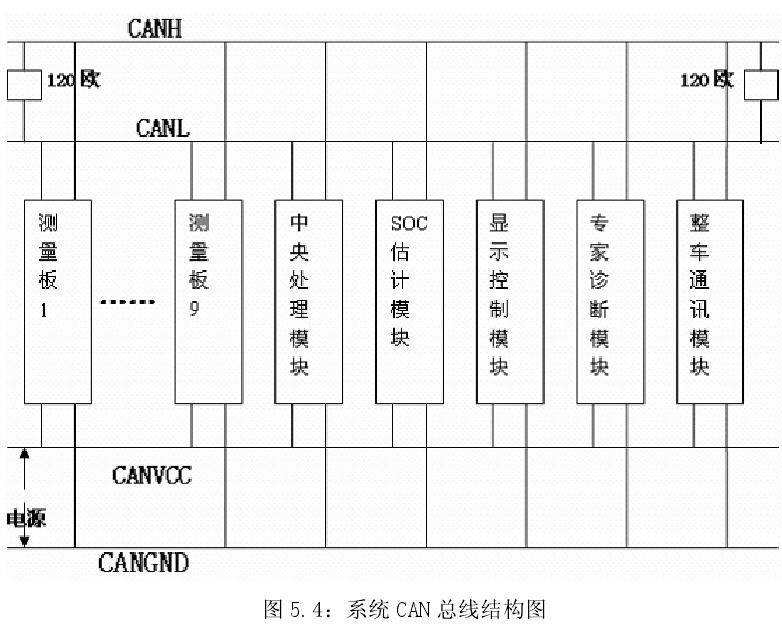
新型电动汽车锂电池管理系统的研究与实现 — CAN 总线设计
51289c4ade087-thumb.jpg (16.67 KB, 下载次数: 157)
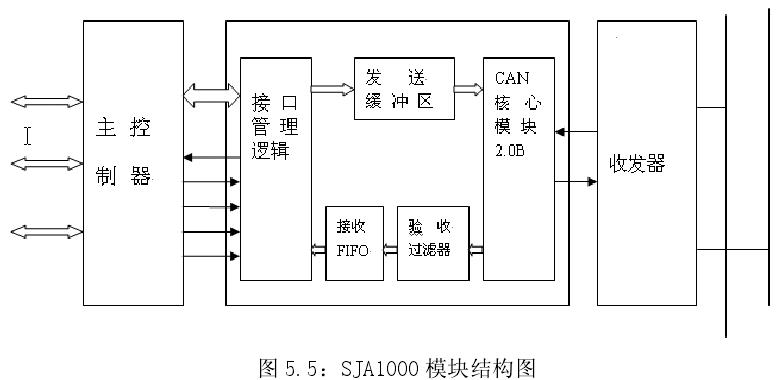
SJA1000的模块结构如图
51289c42ab741-thumb.jpg (20.38 KB, 下载次数: 148)
51289c43802d2-thumb.jpg (44.15 KB, 下载次数: 141)
51289c4475ed6-thumb.jpg (23.03 KB, 下载次数: 158)
51289c4492afc-thumb.jpg (30.88 KB, 下载次数: 153)
51289c452bb35-thumb.jpg (24.2 KB, 下载次数: 148)
51289c45ab460-thumb.jpg (22.53 KB, 下载次数: 157)
51289c427a0b5-thumb.jpg (21.06 KB, 下载次数: 152)