50bb457a98f58-thumb.jpg (8.01 KB, 下载次数: 152)
下载附件 保存到相册
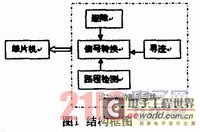
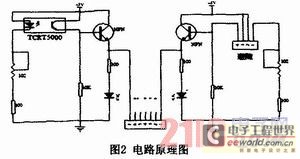
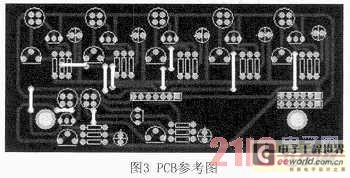
智能小车多功能传感器模块的设计
2015-4-27 22:57 上传
50bb457a99377-thumb.jpg (11.65 KB, 下载次数: 151)
50bb457a99789-thumb.jpg (20.18 KB, 下载次数: 152)