50bb4549aa9b8-thumb.jpg (18.02 KB, 下载次数: 175)
下载附件 保存到相册
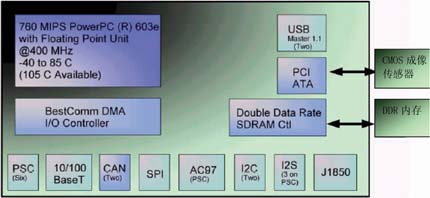
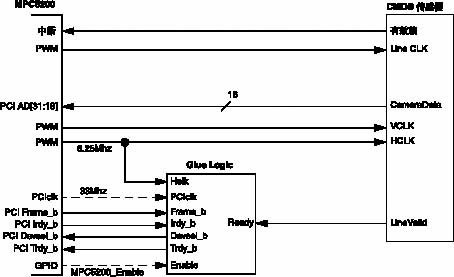
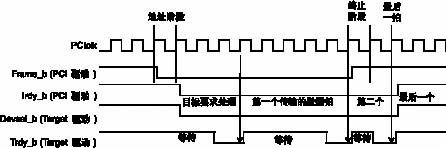
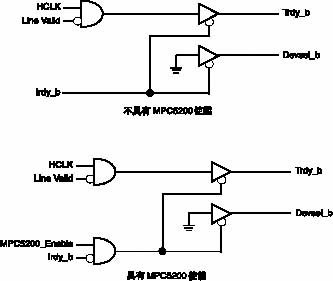
MPC5200在汽车高速视频探测中的应用
2015-4-27 22:58 上传
50bb4549aaff7-thumb.jpg (22.19 KB, 下载次数: 165)
50bb4549ad1bf-thumb.jpg (16.92 KB, 下载次数: 154)
50bb4549ad75e-thumb.jpg (12.79 KB, 下载次数: 154)
50bb4549afa3c-thumb.jpg (17.62 KB, 下载次数: 158)