进入20世纪80年代以后,人们的研究方向逐渐转移到了面向实际应用的室内移动机器人的研究,并逐步形成了自主式移动机器人AMR(Indoor Autonomous Mobile Robot)概念。美国国防高级研究计划局(DARPA)专门立项,制定了地面天人作战平台的战略计划。从此在全世界掀开了全面研究室外移动机器人的序幕,如DARPA的“战略计算机”计划中的自主地面车辆(ALV)计划(1983—1990),能源部制订的为期10年的机器人和智能系统计划(RIPS)(1986—1995),以及后来的空间机器人计划:日本通产省组织的极限环境下作业的机器人计划:欧洲尤里卡中的机器人计划等。初期的研究,主要从学术角度研究室外机器人的体系结构和信息处理,并建立实验系统进行验证。虽然由于80年代对机器人的智能行为期望过高,导致室外机器人的研究未达到预期的效果,但却带动了相关技术的发展,为探讨人类研制智能机器人的途径积累了经验。同时,也推动了其它国家对移动机器人的研究与开发。
Ad-Hoc的英文原意是“特别的、特定的”,Ad-Hoc网络是建立在特定场合的无线网络,由路由器Router和主机Host组成,这些节点可以任意移动位置,因此网络的拓扑结构是任意而不可预测的。Ad-Hoc网络的应用场合非常广泛,早期应用于军队、警察、救护等系统中,这些场合情况紧急,时常伴有灾难和危险。1972年,美国DARPA(Defense Advanced Research Project Agency)就启动了分组无线(PRNET,Packet Radio NETwork)项目,研究分组无线网在战场环下数据通信中的应用。项目完成之后,DAPRA又在1993年启动了高存性自适应网络(SURAN,Survivable Adaptive Network)项目,研究如何将PRNET的成果加以扩展,以支持更大规模的网络,还要开发能适应战场快速变化环境下的自适应网络协议。1994年DARPA又启动了全球移动信息系统(GloMo,Globle Mobile Information Systems)项目。在分组无线网已有成果的基础上对能够满足军事应用需要的、可快速铺设、高抗毁性的移动信息系统进行全面深入的研究,并一直持续至今。
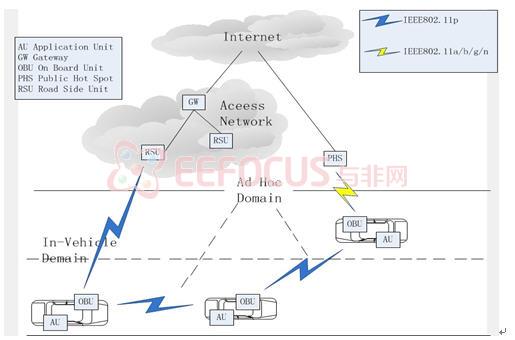
(2)通讯协议
方案一:采用IEEE802.l1p标准,IEEE802.11p(又称WAVE;Wireless Access in the Vehicle Environment)是一种由IEEE 802.11标准发展而来的通讯协议。这个通讯协议主要用在车用电子的无线通讯上。它又对IEEE802.11扩充延伸,来满足ITS系统(Intelligent Trans- portation Systems,ITS)相关应用的需求,802.11p将用在车载通讯(或称专用短距离通讯,Dedicated Short Range Comu- nication,DSRC)系统中。IEEE802.l1p标准主要是解决移动的Ad-hoc网络快速连接高频率切换问题和新的安全问题。从性能上看,802.11p最高传输速率可以达到27Mbps,传输范围达1000米。