51d430a594a44-thumb.jpg (7.58 KB, 下载次数: 154)
下载附件 保存到相册
图1 TRUM-40电机结构图
2015-4-27 23:24 上传
51d430a5e3482-thumb.jpg (19.4 KB, 下载次数: 157)
图2 超声电机PSoC驱动电路控制框图
51d430a5eed70-thumb.jpg (13.89 KB, 下载次数: 163)
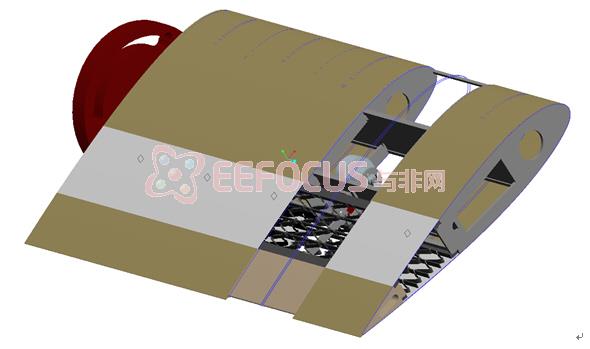
图3 变形机翼的机械结构图