5354c013bb9ff-thumb.jpg (8.92 KB, 下载次数: 152)
下载附件 保存到相册
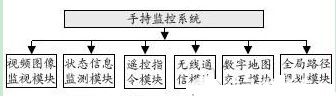
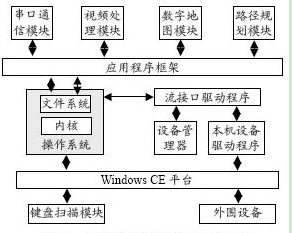
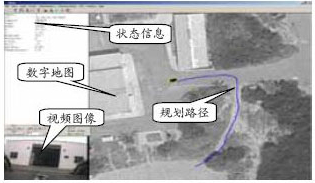
便携式移动机器人手持监控系统设计
2015-4-27 23:24 上传
5354bfc6ba40f-thumb.jpg (11.18 KB, 下载次数: 155)
5354c013a31d2-thumb.jpg (16.28 KB, 下载次数: 155)
5354c0bb107d7-thumb.jpg (8.62 KB, 下载次数: 160)
5354c1001a869-thumb.jpg (3.44 KB, 下载次数: 154)
5354c0fff1988-thumb.jpg (12.49 KB, 下载次数: 147)