5327abe9c9db2-thumb.jpg (23.22 KB, 下载次数: 230)
下载附件 保存到相册
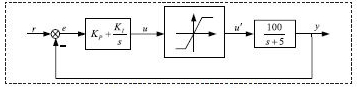
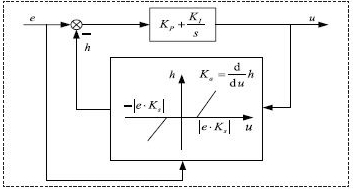
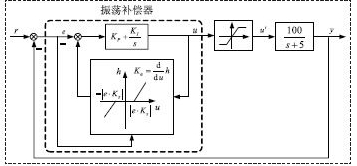
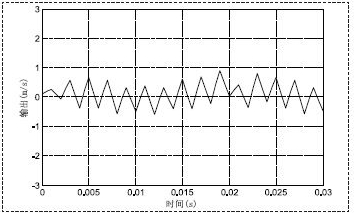
基于低采样率控制系统的振动抑制设计方案
2015-4-27 23:27 上传
5327abe9a9926-thumb.jpg (3.53 KB, 下载次数: 229)
5327ac137ec0c-thumb.jpg (8.11 KB, 下载次数: 226)
5327ac3b90349-thumb.jpg (12.23 KB, 下载次数: 230)
5327abf56685b-thumb.jpg (31.72 KB, 下载次数: 236)
5327ac8735deb-thumb.jpg (13.9 KB, 下载次数: 234)
5327ac92edf73-thumb.jpg (19.01 KB, 下载次数: 235)
5327ac9313202-thumb.jpg (19.06 KB, 下载次数: 246)
5327ac92eded7-thumb.jpg (17.55 KB, 下载次数: 243)