50fc9a8a98d90-thumb.jpg (27.7 KB, 下载次数: 172)
下载附件 保存到相册
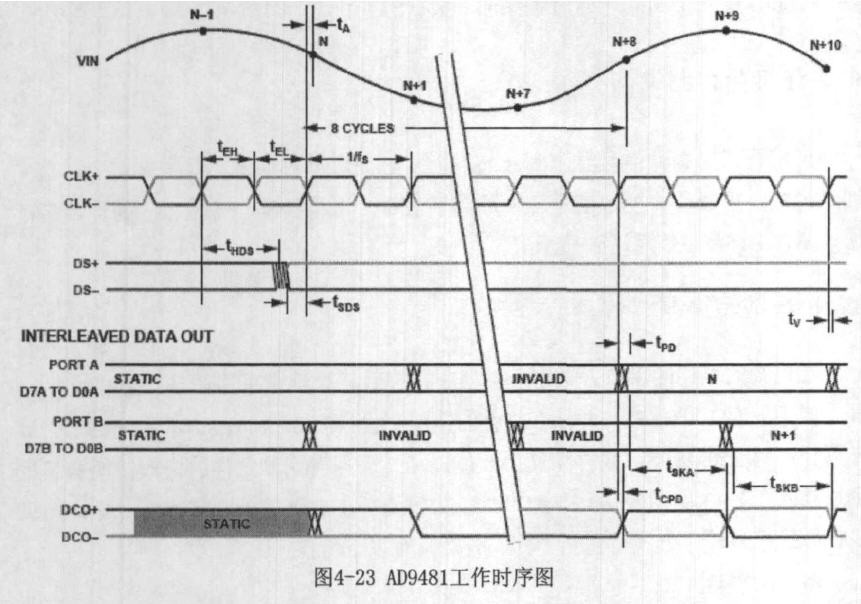
AD9481的具体时序图
2015-4-27 23:35 上传
50fc9a8c11f66-thumb.jpg (18.12 KB, 下载次数: 163)
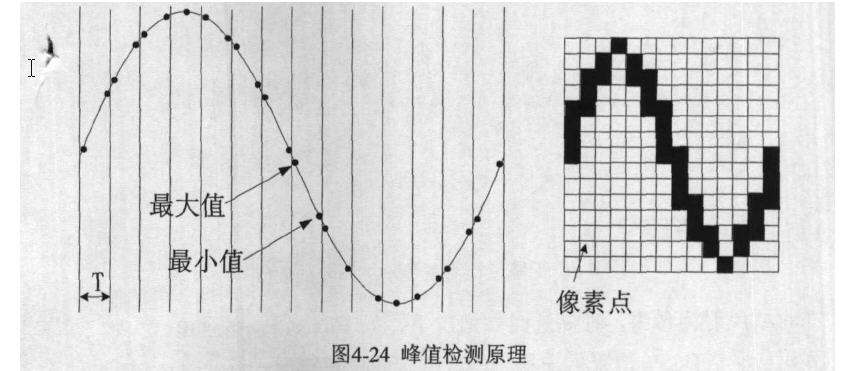
峰值检测原理
50fc9a8aa3d4b-thumb.jpg (9.21 KB, 下载次数: 177)
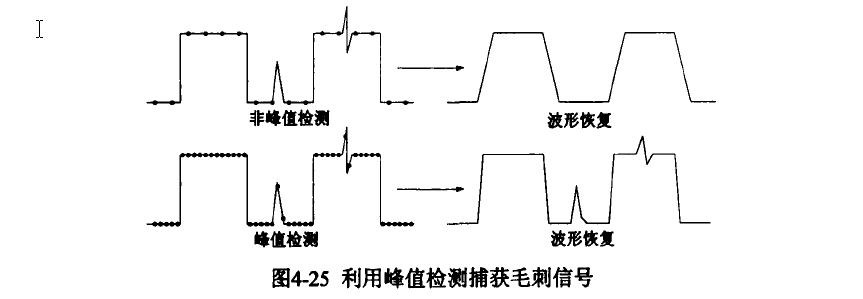
利用峰值检测捕获毛刺信号
50fc9a8c51b5a-thumb.jpg (12.33 KB, 下载次数: 168)
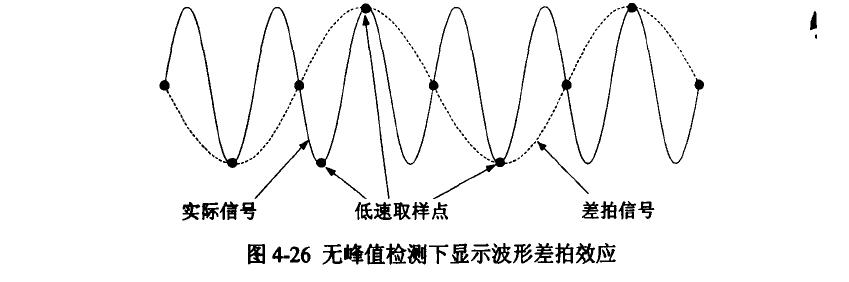
无峰值检测下显示波形差拍效应
50fc9a8f9ad31-thumb.jpg (29.08 KB, 下载次数: 159)
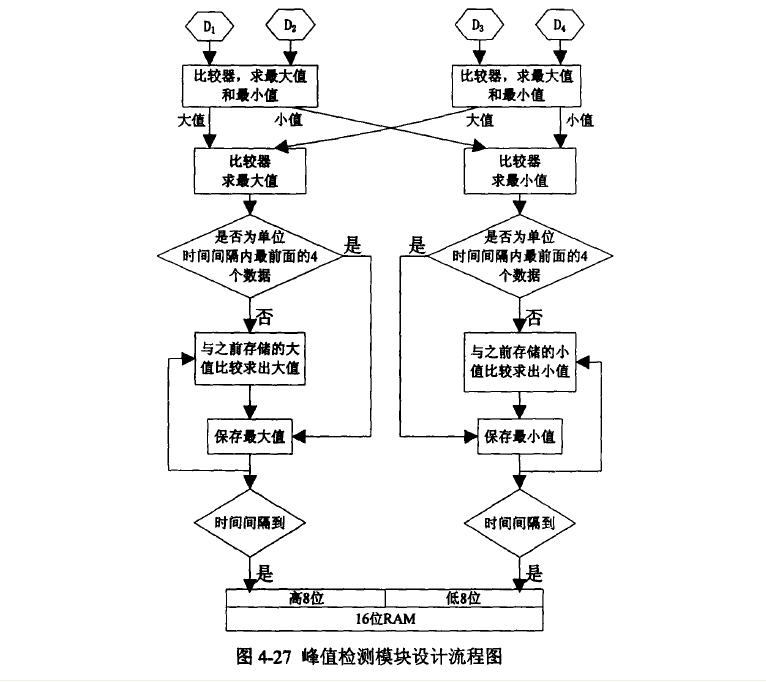
峰值检测模块设计流程图
50fc9a8bdbf4a-thumb.jpg (13.96 KB, 下载次数: 163)
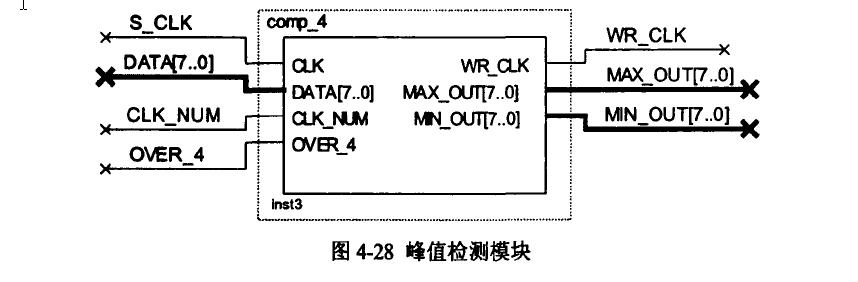
峰值检测模块
50fc9a8c217a7-thumb.jpg (16.23 KB, 下载次数: 161)
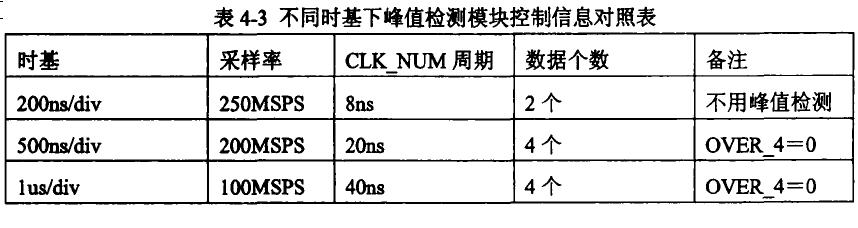
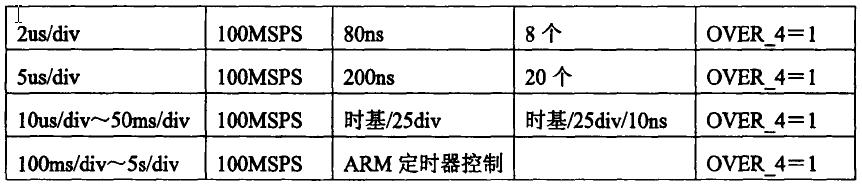
在不同时基情况下起用峰值检测模块控制信息相关对照表
50fc9a8c21f01-thumb.jpg (15.41 KB, 下载次数: 174)
时域反射仪的硬件设计与实现----关键电路设计(三)
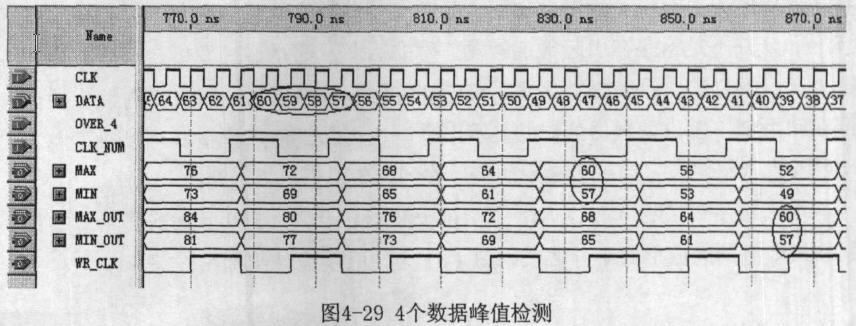
50fc9a8d33ea7-thumb.jpg (23.91 KB, 下载次数: 176)
4个峰值检测电路时序仿真图
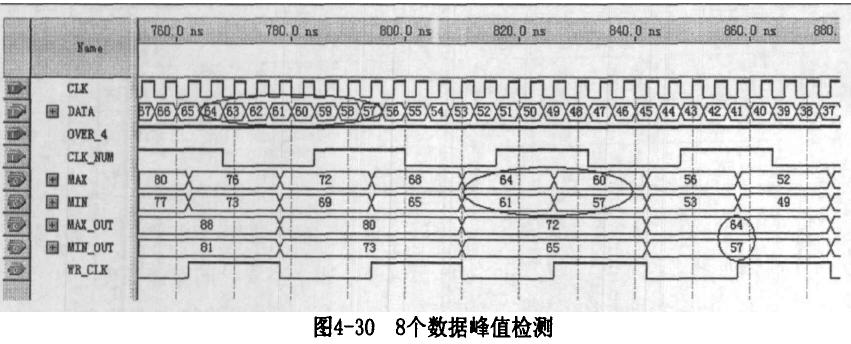
50fc9a8dc3c34-thumb.jpg (23.7 KB, 下载次数: 157)
8个峰值检测电路时序仿真图
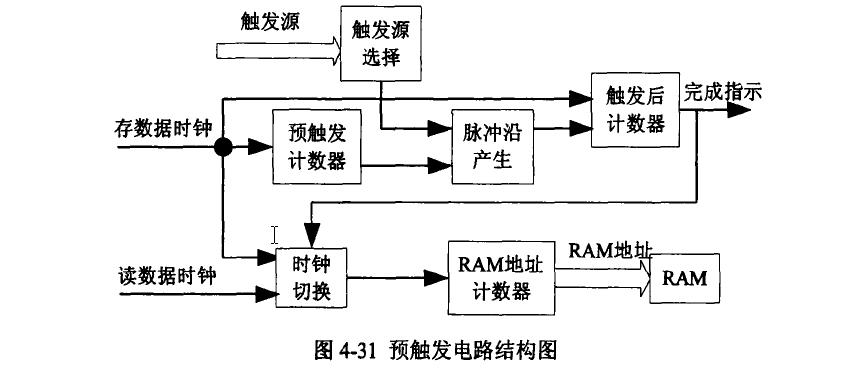
50fc9a8eb5f8b-thumb.jpg (15.66 KB, 下载次数: 164)
预触发设计结构图
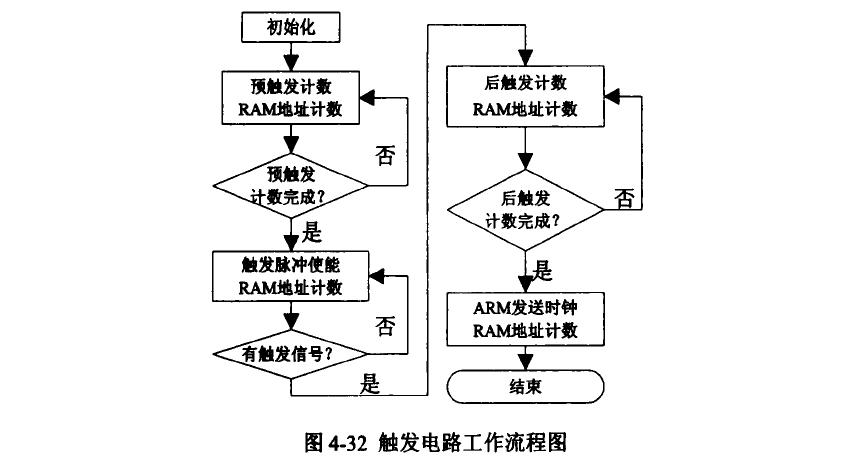
50fc9a8eb64a4-thumb.jpg (17.58 KB, 下载次数: 174)
预触发电路的工作流程图
50fc9a8a713aa-thumb.jpg (9.92 KB, 下载次数: 164)
RAM模块在预触发下的工作模式