550f9131a19ec-thumb.jpg (19.24 KB, 下载次数: 190)
下载附件 保存到相册
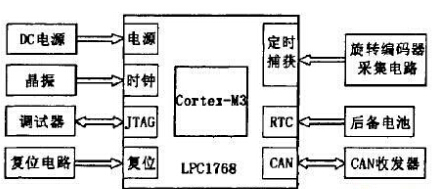
基于ARM的旋转编码器采集模块设计
2015-4-27 23:47 上传
550f913178bb4-thumb.jpg (20.57 KB, 下载次数: 192)
550f913178ca6-thumb.jpg (8.11 KB, 下载次数: 178)
550f9131a1442-thumb.jpg (14.12 KB, 下载次数: 181)
550f9131a0eae-thumb.jpg (14.73 KB, 下载次数: 188)
550f9131a15c9-thumb.jpg (20.96 KB, 下载次数: 195)