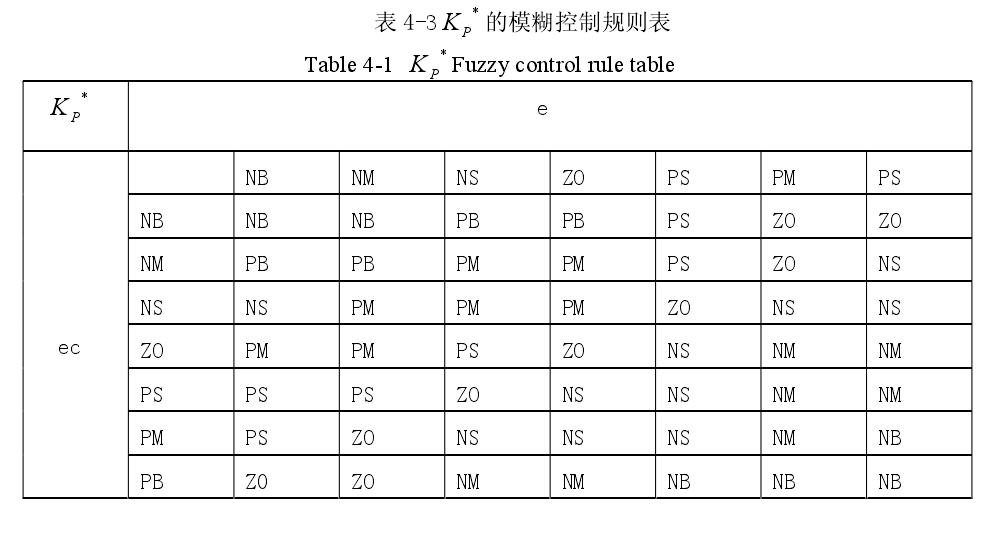
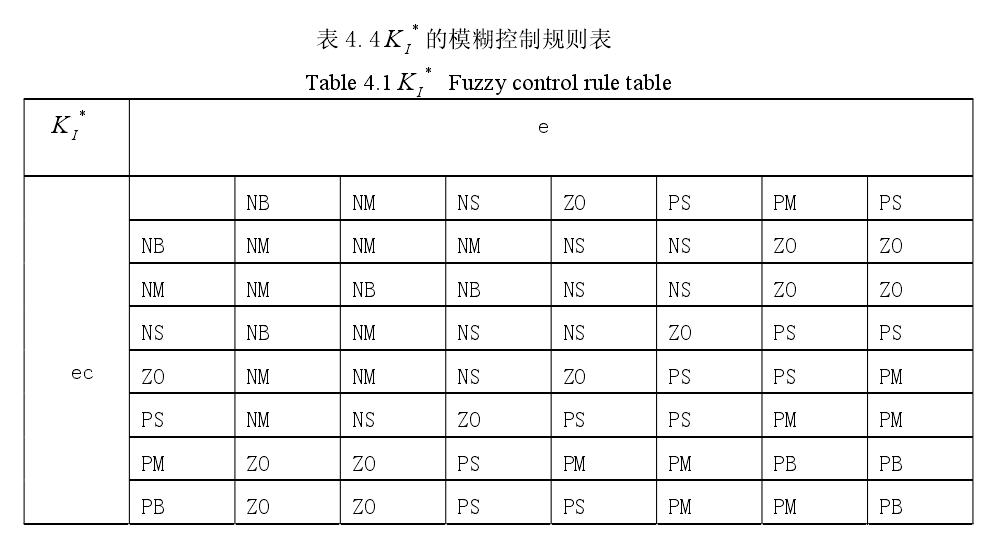
a.系统刚投入工作时,偏差e较大,为了提高系统响应速度,必须取较大的比例值,即模糊控制器输出较大的K*P.同时,应减小系统的微分作用,以防止系统的微分饱和,即模糊控制器输出较小的K*i.
b. e*ec>0时。此时,偏差朝着绝对值增大的方向变化。当系统处于跟随状态时(e与ec大小适中),此时模糊控制器应输出较小的K*P,中等大小的K*i.若此时绝对偏差较大,应增大比例值,减小积分作用,即对系统采取较强的控制措施,改变误差的变化方向。若绝对偏差较小,说明系统的偏差不大,此时的控制的主要目的在于消除静差,防止震荡。因此,比例值取适中值,增强积分作用。
c. e*ec此时,偏差e与其变化率ec方向相反,说明系统偏差朝着绝对值减小的方向变化。当绝对偏差较小时,减小比例值,消除静差、防止超调使系统获得良好的动态性能。若绝对偏差较大,则应适当增强比例值,提高系统的响应速度。取较小的积分值以保证系统的稳态性能。