54e064b1ae32b-thumb.jpg (24.75 KB, 下载次数: 235)
下载附件 保存到相册
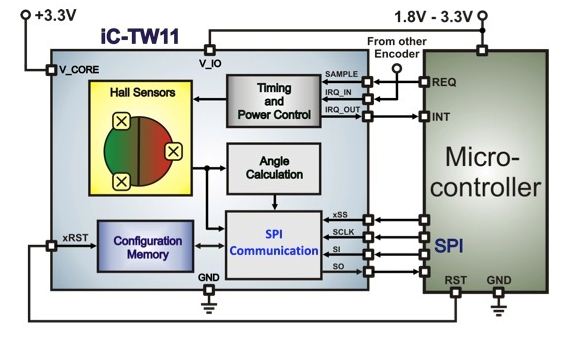
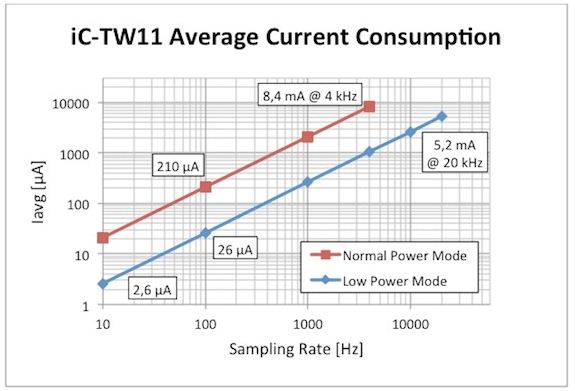
电池供电电子产品中的位置编码
2015-4-28 14:52 上传
54e064b1440e9-thumb.jpg (24.96 KB, 下载次数: 234)
54e064fbd5c88-thumb.jpg (26.45 KB, 下载次数: 235)