5153caf044e33-thumb.jpg (16.56 KB, 下载次数: 492)
下载附件 保存到相册
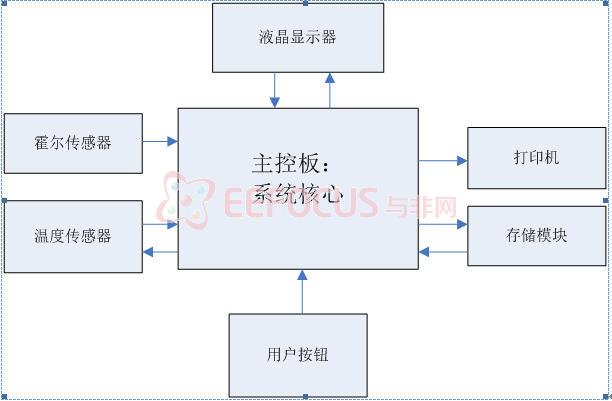
图2.1 系统框架图
2015-4-29 08:05 上传
5153cb069c0ec-thumb.jpg (46.77 KB, 下载次数: 483)
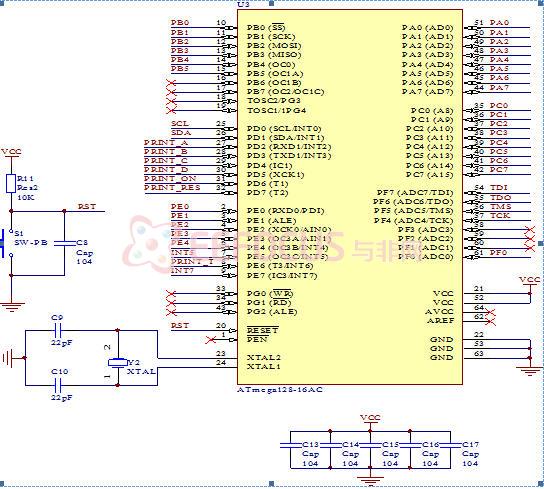
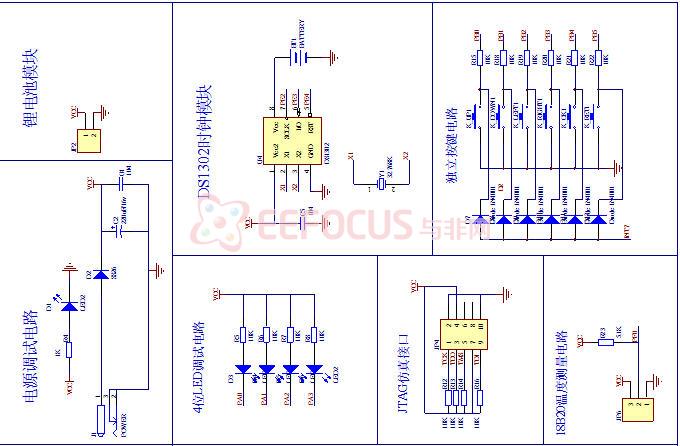
图3.1 核心板最小系统
5153caf49b623-thumb.jpg (17.42 KB, 下载次数: 469)
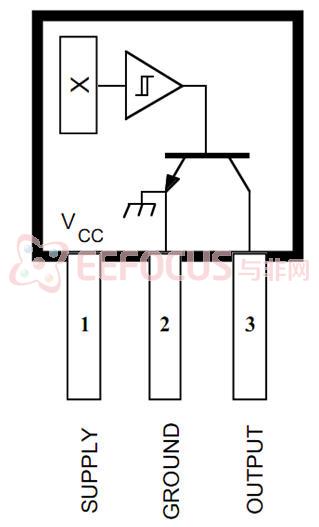
图3.2 霍尔元件结构图
5153cb2699315-thumb.jpg (7.31 KB, 下载次数: 474)
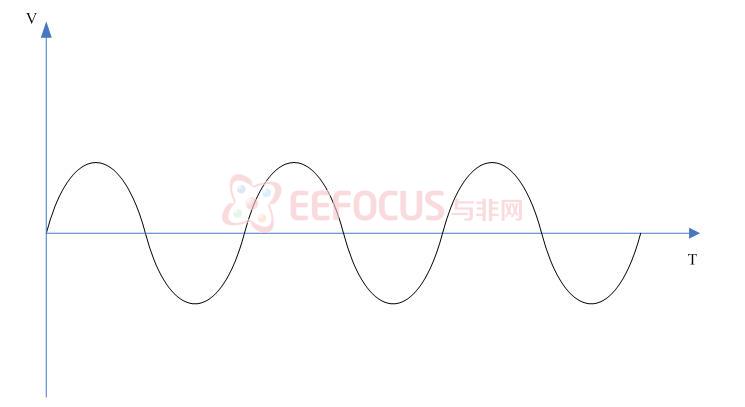
图3.3 霍尔元件信号输出
5153cb190a021-thumb.jpg (12.99 KB, 下载次数: 498)
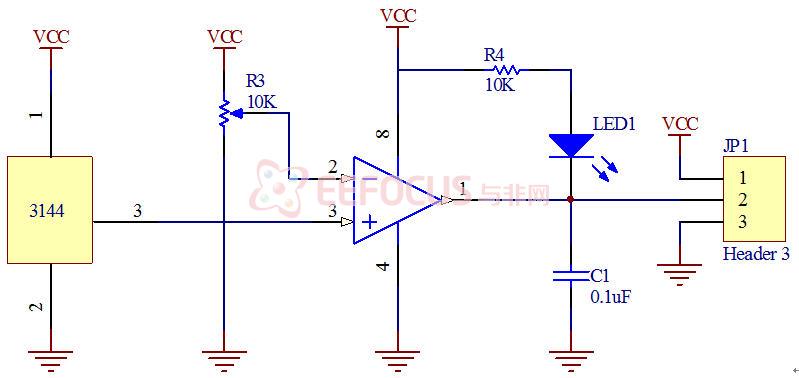
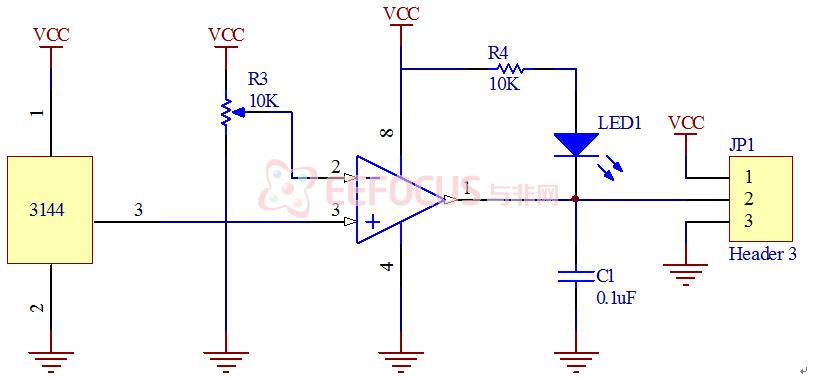
图3.4 改良的霍尔传感器
5153caf18fb20-thumb.jpg (7.51 KB, 下载次数: 492)
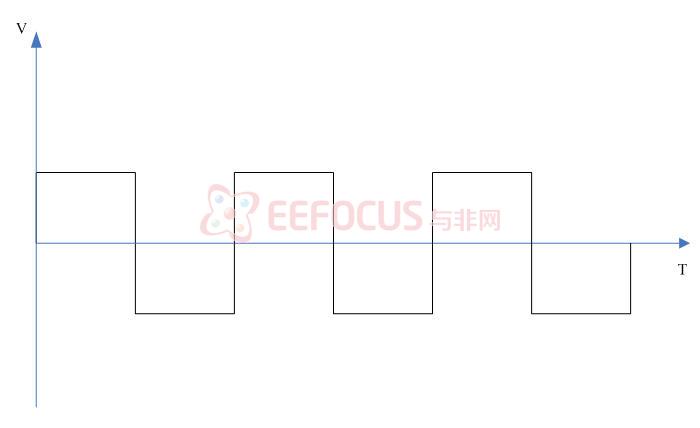
图3.5 霍尔传感器输出信号
5153caf5284c4-thumb.jpg (11.62 KB, 下载次数: 473)
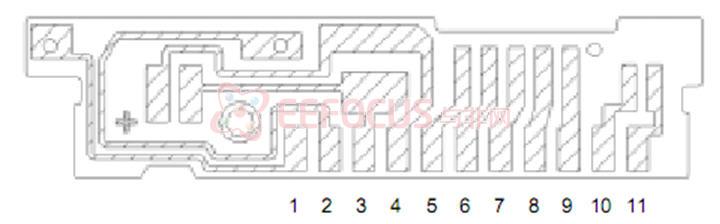
图3.6 打印机实物接口
5153cb04130d1-thumb.jpg (20.41 KB, 下载次数: 517)
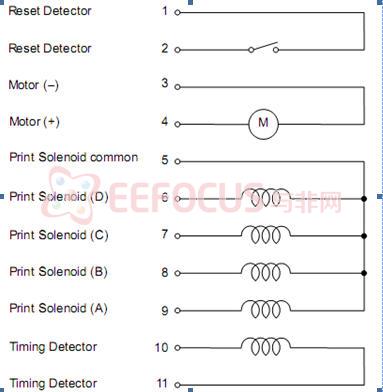
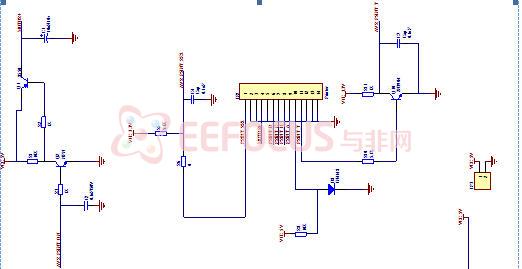
图 3.7 打印机信号接口
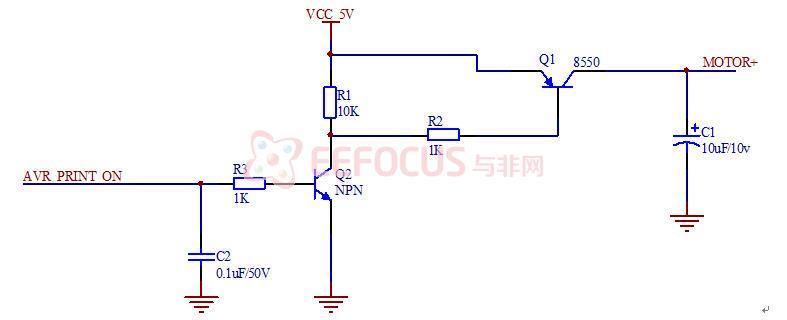
5153cae26da73-thumb.jpg (8.56 KB, 下载次数: 492)
图3.8 打印机电机驱动
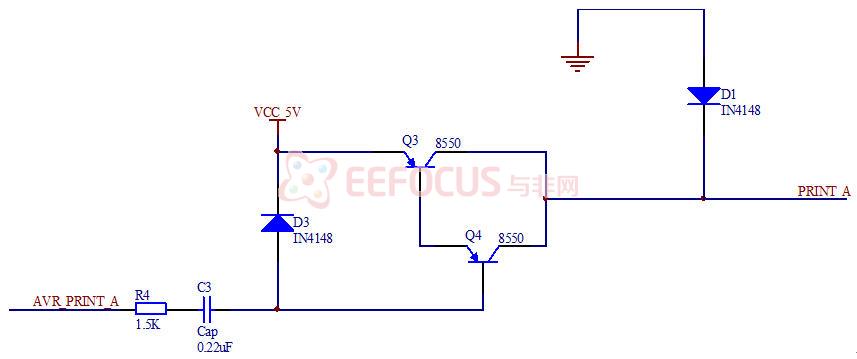
5153cae26cfd4-thumb.jpg (8.22 KB, 下载次数: 513)
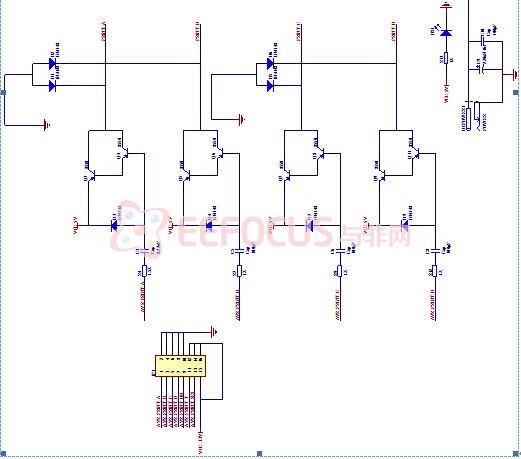
图3.9 打印针驱动
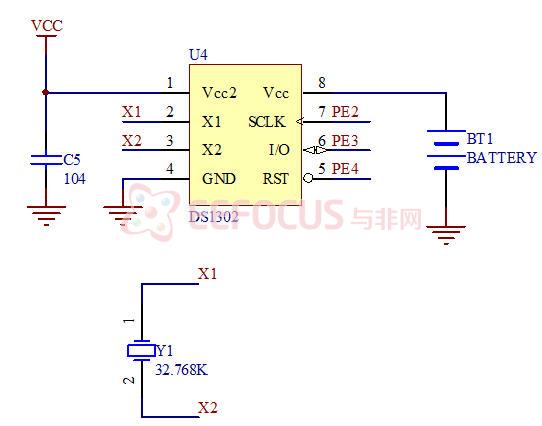
5153caf3327bf-thumb.jpg (17.17 KB, 下载次数: 488)
图3.10 DS1302时钟模块
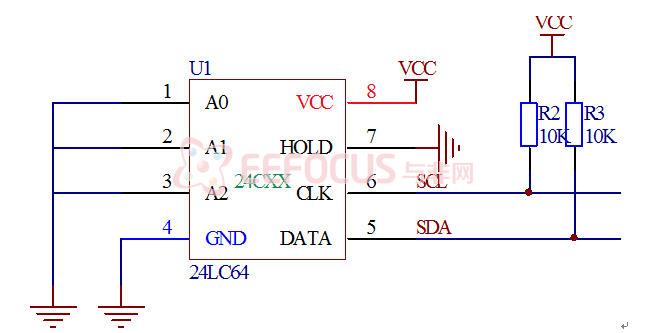
5153cba4db8dd-thumb.jpg (14.92 KB, 下载次数: 467)
图3.11 EEPROM存储电路
5153cae365f32-thumb.jpg (11.31 KB, 下载次数: 502)
图 3.12 温度传感器模块
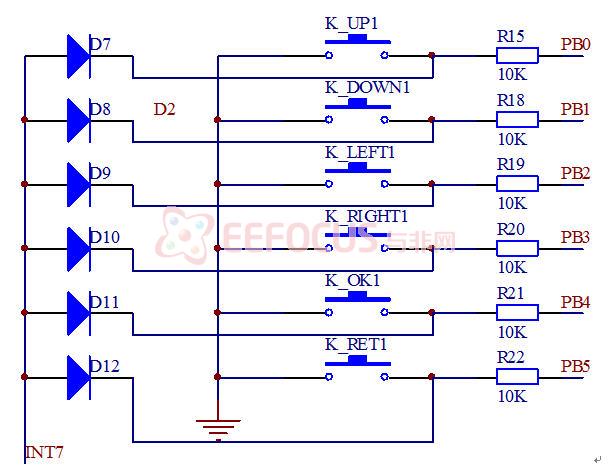
5153cae50d6f9-thumb.jpg (30.69 KB, 下载次数: 502)
图3.13 独立按键电路
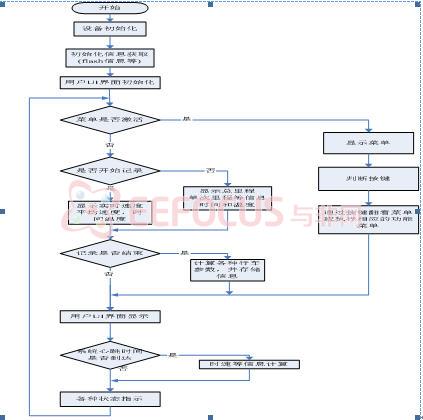
5153cae77dab4-thumb.jpg (24.63 KB, 下载次数: 507)
图4.1 嵌入式软件整体流程图
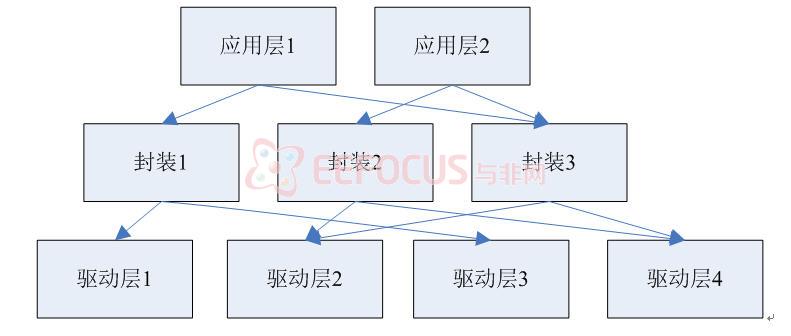
5153caf008ad2-thumb.jpg (12.65 KB, 下载次数: 482)
图 4.2 嵌入式软件层次结构
5153caf35817f-thumb.jpg (13.08 KB, 下载次数: 486)
图4.3 基于节点编号的菜单系统结构
5153caf357cb3-thumb.jpg (19.57 KB, 下载次数: 475)
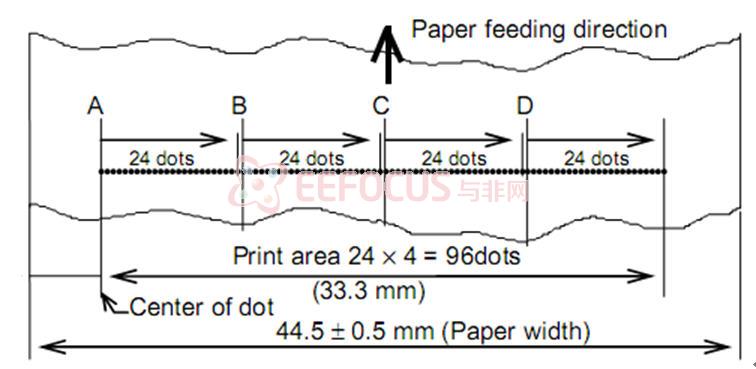
图4.4 打印机点在打印纸上的分布
5153caf331564-thumb.jpg (11.44 KB, 下载次数: 477)
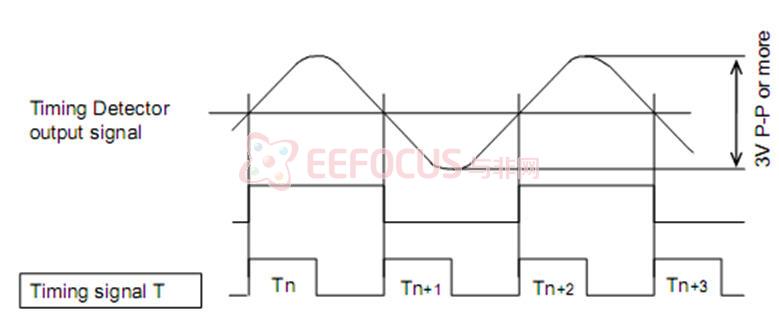
图4.5 打印机Timing Dector信号
5153cb5e1da90-thumb.jpg (8.7 KB, 下载次数: 489)
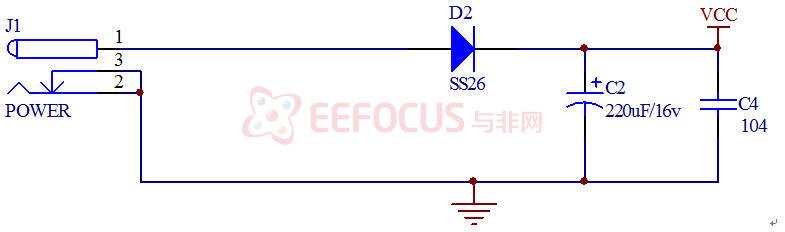
图5.1 主控板电源模块
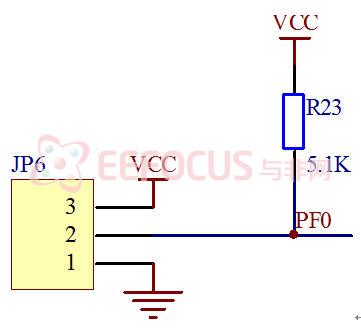
5153caffca2b9-thumb.jpg (12.75 KB, 下载次数: 473)
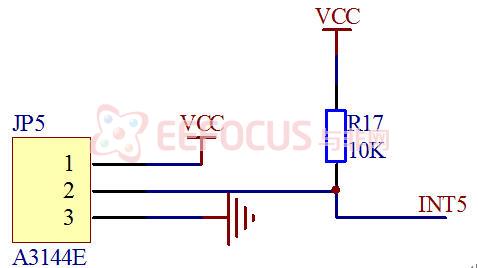
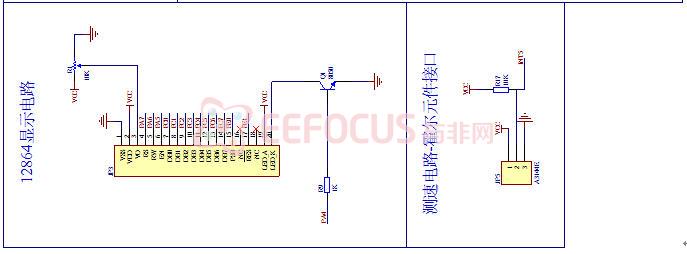
图5.2 霍尔元件接口
5153cb286b01d-thumb.jpg (28.22 KB, 下载次数: 485)
基于AVR单片机的自行车行车记录仪,包括软硬件具体方案
5153caf9d0072-thumb.jpg (30.04 KB, 下载次数: 494)
5153caf4599aa-thumb.jpg (11.72 KB, 下载次数: 487)
5153caf517a8b-thumb.jpg (14.37 KB, 下载次数: 475)
5153cafa48dc5-thumb.jpg (23.7 KB, 下载次数: 514)
5153cb0405164-thumb.jpg (12.58 KB, 下载次数: 489)