5142e5e66baa0-thumb.jpg (12.42 KB, 下载次数: 453)
下载附件 保存到相册
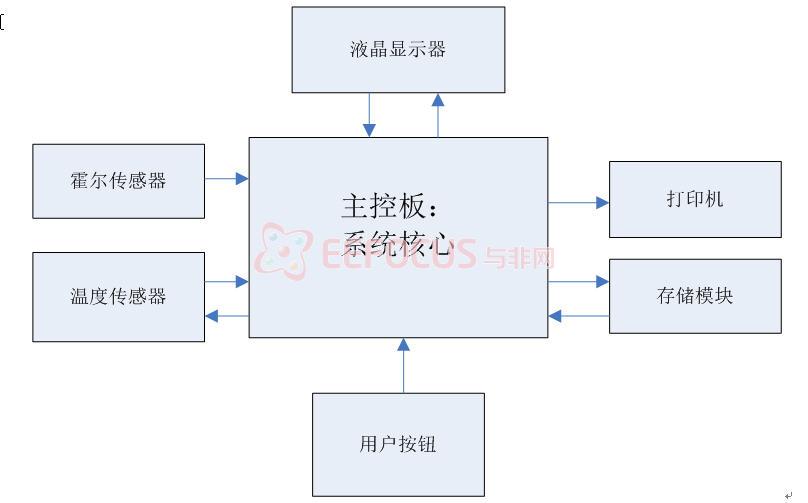
图2.1 系统框架图
2015-4-29 08:07 上传
5142e5e6ed279-thumb.jpg (46.46 KB, 下载次数: 466)
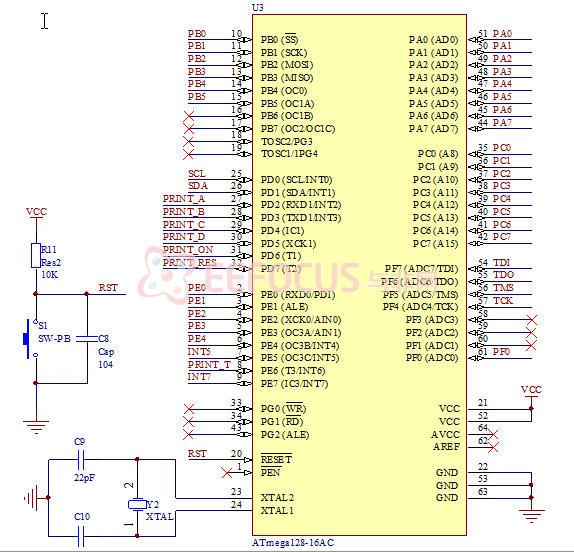
图3.1 核心板最小系统
5142e6af8bc84-thumb.jpg (5.87 KB, 下载次数: 468)
5142e5e6ec313-thumb.jpg (10.84 KB, 下载次数: 466)
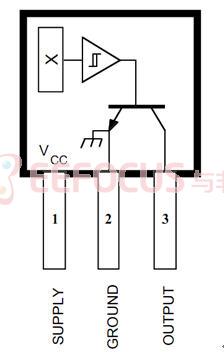
图3.2 霍尔元件结构图
5142e5e77636f-thumb.jpg (8.67 KB, 下载次数: 443)
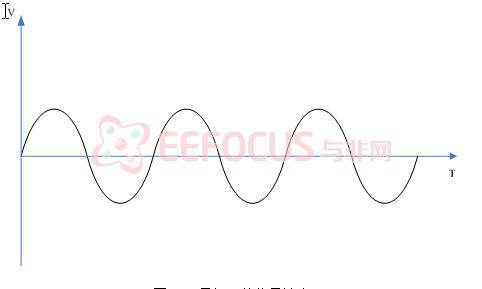
图3.3 霍尔元件信号输出
5142e5e87d01b-thumb.jpg (11.9 KB, 下载次数: 458)
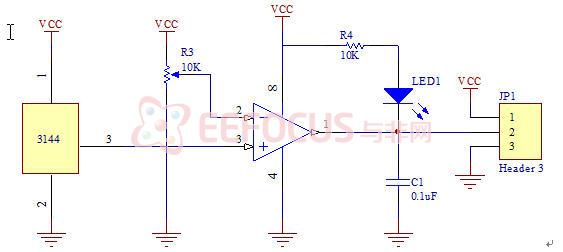
图3.4 改良的霍尔传感器
5142e5e6ed66d-thumb.jpg (7.37 KB, 下载次数: 469)
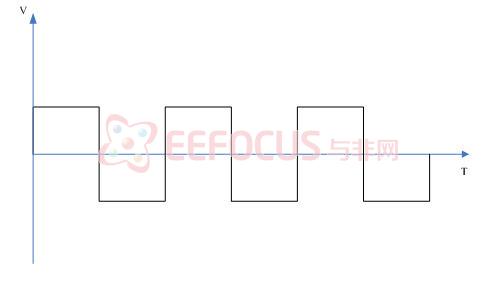
图3.5 霍尔传感器输出信号
5142e5e87ec4c-thumb.jpg (14.05 KB, 下载次数: 444)
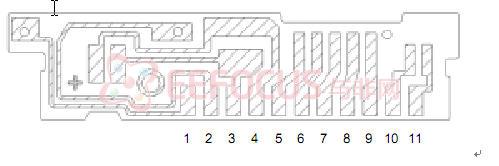
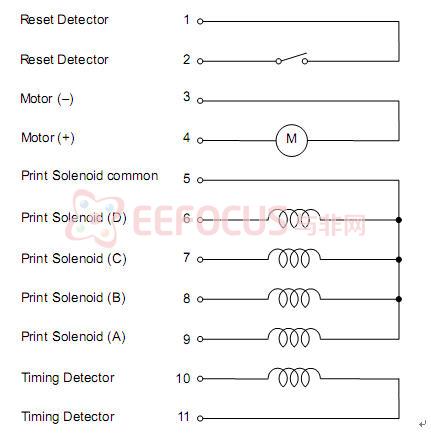
图3.6 打印机实物接口
5142e5e87cc4b-thumb.jpg (22.76 KB, 下载次数: 452)
图 3.7 打印机信号接口
5142e5e7f31d4-thumb.jpg (9.22 KB, 下载次数: 453)
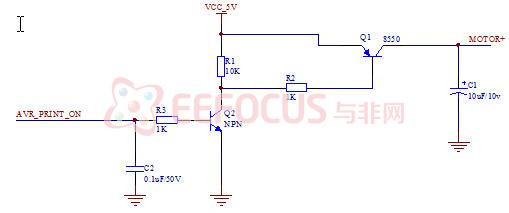
图3.8 打印机电机驱动
5142e5e80100b-thumb.jpg (7.83 KB, 下载次数: 447)
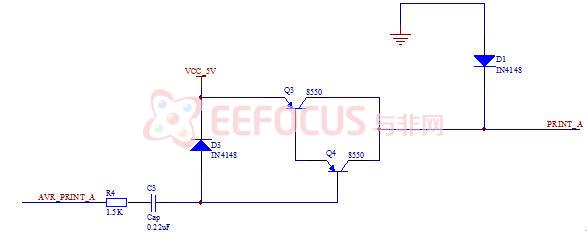
图3.9 打印针驱动
5142e5e87f9be-thumb.jpg (12.08 KB, 下载次数: 450)
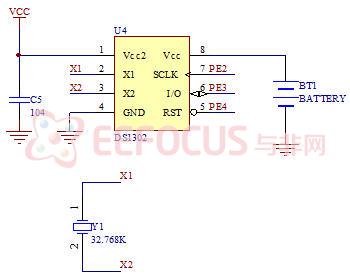
图3.10 DS1302时钟模块
5142e5e87e677-thumb.jpg (13.86 KB, 下载次数: 471)
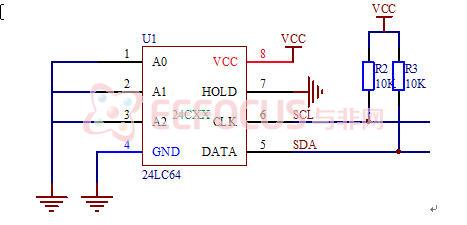
图3.11 EEPROM存储电路
5142e5e8d0d32-thumb.jpg (7.62 KB, 下载次数: 468)
图 3.12 温度传感器模块
5142e5e9dce2b-thumb.jpg (23.97 KB, 下载次数: 449)
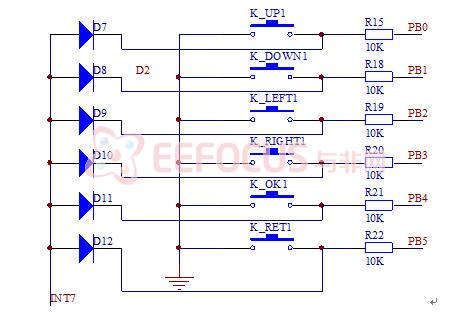
图3.13 独立按键电路
5142eaee37391-thumb.jpg (18.73 KB, 下载次数: 446)
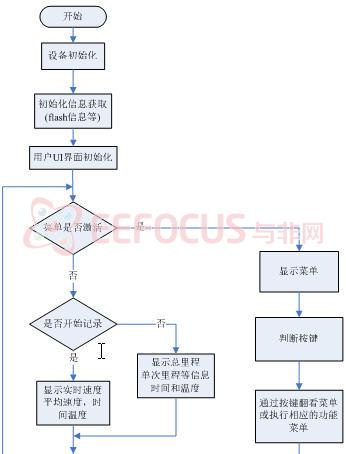
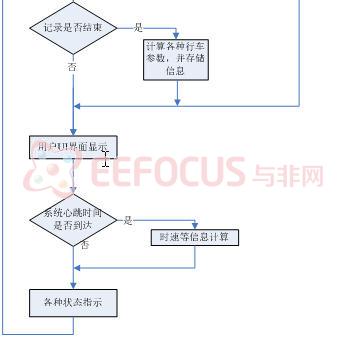
图4.1 嵌入式软件整体流程图
5142eaf63da04-thumb.jpg (13.15 KB, 下载次数: 441)
5142e84645928-thumb.jpg (13.74 KB, 下载次数: 482)
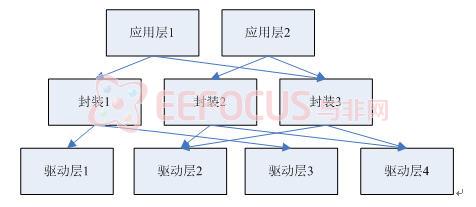
图 4.2 嵌入式软件层次结构
5142e5e9dabfc-thumb.jpg (13.9 KB, 下载次数: 450)
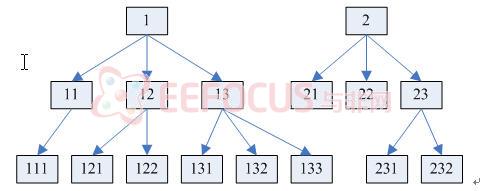
图4.3 基于节点编号的菜单系统结构
5142e5e9dabe8-thumb.jpg (18.42 KB, 下载次数: 447)
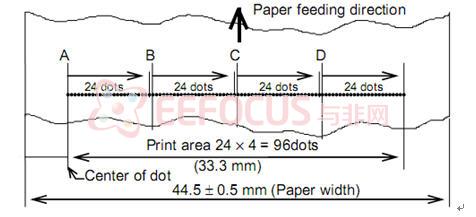
图4.4 打印机点在打印纸上的分布
5142e5e9dca47-thumb.jpg (9.96 KB, 下载次数: 439)
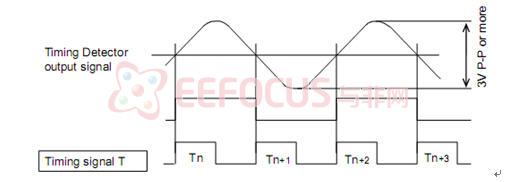
图4.5 打印机Timing Dector信号
5142e5ea782d5-thumb.jpg (9.24 KB, 下载次数: 460)
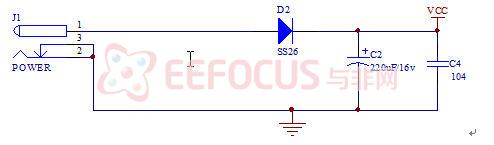
图5.1 主控板电源模块
5142e5ea785e6-thumb.jpg (7.6 KB, 下载次数: 451)
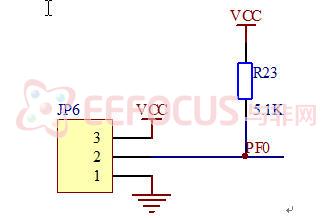
图5.2 霍尔元件接口