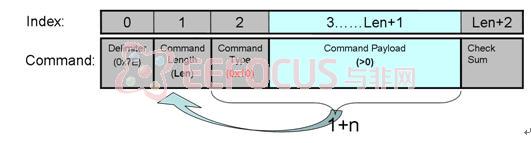
| 命令 | 操作码(最左端开始) | 操作数的长度(紧跟操作码) | 总长度(字节) |
| Copy | 1 | 15 | 2 |
| Delete | 000 | 13 | 2 |
| Replace | 001XXXXX | 8 | 2 |
| Insert | 010XXXXX | 8 | 2 |
| Kill | 011XXXXX | 8 | 2 |
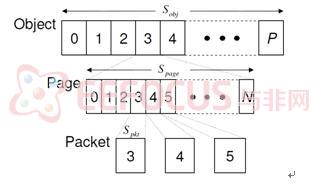
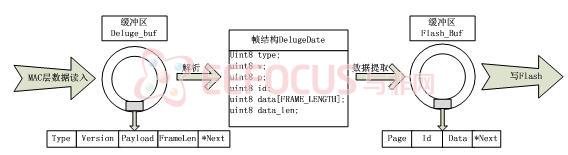
| 数据项 帧类型 | type | v | p | id | data | data_len |
| 数据帧 | DATA | 版本号 | 页号 | 帧号 | 数据 | 数据长度 |
| 结束帧 | END | 版本号 | 页号 | 帧号 | — | — |
| 广告帧 | ADV | 版本号 | 页号 | 源节点标识 | — | — |
| 请求帧 | REQ | 版本号 | 页号 | 目标节点标识 | — | — |
| 命令帧 | CMD | 命令参数 | — | — | — | — |

| 欢迎光临 DIY编程器网 (http://diybcq.com/) | Powered by Discuz! X3.2 |