前言
太阳能电池的发展始于上世纪五十年代,最初应用于宇宙开发,航空航天等领域,经过近五十年的发展,无论从发展速度、技术成熟性,还是从应用领域来看,太阳能电池都是新能源中的佼佼者。太阳能电池具有许多优点,比如:安全可靠、无噪声、无污染、能量随处可得、不受地域限制、无须消耗燃料、可以无人值守、建站周期短、规模大小随意、可以方便地与建筑物相结合等,这些优点都是其他发电方式所不及的。但是,太阳能电池并不是一个理想的电源,其输出特性受光照强度和光线频谱等影响,输出电流很不稳定,所以太阳能电池不能直接驱动用电装置,而需要将太阳能电池先存储在电池中,然后通过电池为用电装置供电。
目前,人们常以蓄电池作为太阳能电池的储电装置,但是,蓄电池的维护较复杂,需专门的电池间,有腐蚀性气体排出,必须现场初充电50-90小时,需专人维护,而且,不及时恢复性充电会损害电池,蓄电池对温度也很敏感,寿命较短。
锂电池作为二次电池之一,具有能量密度高、工作电压高、自放电小,可快速充放电、寿命长、允许温度范围宽、体积小、输出功率大、无记忆效应和无环境污染等优点,综合性能优于铅酸、镍镉、镍氢和金属锂电池,被称为性能最好的电池。虽然锂电池也存在缺点,但同其优点相比,那些缺点不应成为主要问题,特别是用于一些高科技,高附加值的产品中。目前,锂电池在市场中成长快速、利润高、已成为许多先进国家竞相发展的研究项目,其未来需求及发展前景是相当好的。
鉴于上述原因,可以用锂电池代替蓄电池作为太阳能电池的储电装置。随即带来的锂电充电问题便成了锂电应用中的重要课题。市场上现有的锂电池充电器,要么通用性不够强,要么精度达不到要求,而且,随着太阳能产业的快速发展,不可再生资源的逐渐减少,现有的交流电供电式充电器必有被取代之势。
为了实现在太阳能供电下对锂电池充放电的高精度控制,提升锂电池工作性能,延长锂电池寿命,本文设计了一款基于AVR单片机的追光智能锂电池充电系统,实现了智能追光,并确保锂电池不会过充、过热而损坏,大大提高安全性能,延长锂电池的使用寿命。该系统还通过与上位机通信,将锂电池的状态实时显示在上位机界面上,便于实现对锂电池的智能化管理。系统也具有电路稳定性强、可靠性高、控制精度高、操作简便、易于软件升级等特点。
追光、锂电池充电基本原理
追光原理
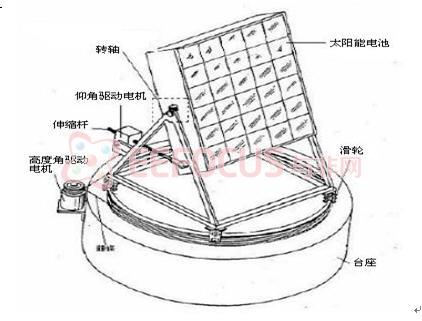
单轴跟踪追光
单轴跟踪追光的优点是结构简单,但是由于入射光线不能始终与主光轴平行,收集太阳能的效果并不理想。
图1是单轴跟踪追光的一个实例。
图1 单轴跟踪
双轴跟踪追光
双轴跟踪追光可以通过跟踪太阳高度和赤纬角的变化,获得最多的太阳能,但是其结构复杂,成本相对较高。
双轴跟踪追光的原理图如图2所示。
图2 双轴跟踪
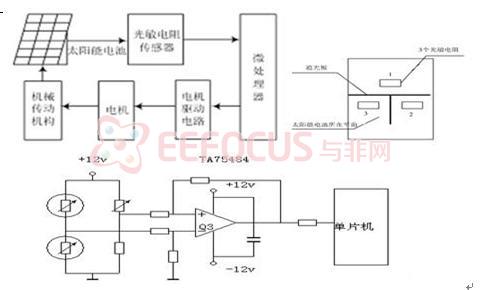
光电跟踪追光
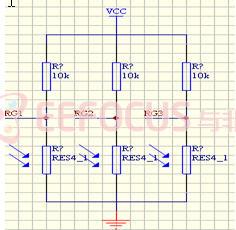
光电检测就是检测太阳高度角和方位角的变化,可以使用3个光敏电阻将光信号转换为电信号,组建桥式电路,分别通过如图3电路接通单片机的A/D通道,微处理器根据得到的电压数据,控制电机动作。
图3光电跟踪
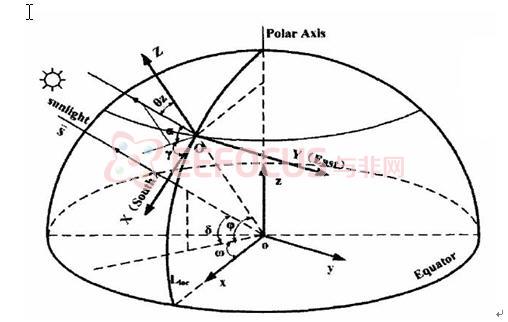
视日运动轨迹跟踪追光
由于太阳的高度角和方位角决定了太阳的位置,故可以根据当地的经纬度确定太阳的位置,然后调节太阳能将电池板与地面的角度,实现追光。
太阳位置计算几何数学模型如图4所示。
图4视日运动轨迹跟踪
光电跟踪与视日运动轨迹跟踪配合追光
光电跟踪和视日运动轨迹跟踪相结合的设计方法能够加强系统的稳定性,提高系统的跟踪精度,能够实现各种天气下对太阳的跟踪。
锂电池充电原理
(1)锂电池充电要求
锂电池的充电要求有:
① 终止充电电压的允差为额定值的±1%,过压充电会造成锂离子电池永久性损坏。
② 充电速率常用为0.5C—1C。采用0.5C充电速率时,因充电过程中的电化学反应会产生热量,所以有一定的能量损失。
③ 锂离子电池充电的温度范围为0℃—60℃,如果电流过大,会使温度过高。不仅会损坏电池,而且可能引起爆炸。
④ 锂离子电池的终止放电电压为2.5V,严重过放电可能造成锂离子电池失效。对过放电的电池充电可以通过预处理进行补救,当锂离子电池电压大于2.5V,则按正常方式充电;若锂离子电池低于2.5V,则用小电流充电,充到2.5V后再按正常方式充电。
锂电池在使用过程中,为保证使用安全,延长锂电池寿命,还需添加锂电池保护板,锂电池保护板详细资料请参见附录一。
(2)恒流充电
采用恒流充电式,可使电池具有较高的充电效率,该方法在整个充电过程中采用恒定电流对电池进行充电,如图5所示。这种方法操作简单,易于做到,特别适合对由多个电池串联的电池组进行充电。但由于锂电池的可接受电流能力是随着充电过程的进行而逐渐下降的,在充电后期,若充电电流仍然不变,充电电流多用于电解质,产生大量气泡,这不仅消耗电能,而且容易造成极板上活性物质脱落,影响锂电池的寿命。
图5 恒流充电
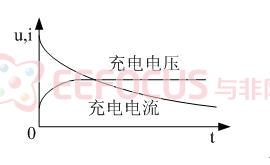
(3)恒压充电
在恒压充电法中,电池两端电压决定了充电电流,充电电源的电压在全部充电时间里保持恒定的数值,随着锂电池端电压的逐渐升高,电流逐渐减少。充电电流随着电压波动而变化,因此充电电流的最大值应设置在充电电压最高时,以免使电池过充电。实际上,恒压充电曲线如图6所示,从图中可以看到,充电初期充电电流过大,这样对锂电池的寿命会造成很大影响。另外,在此种充电方式中,充电末期电池温度会升高,很有可能造成电池的热失控,损害电池的性能,因此不推荐采用恒压充电方式。
图6恒压充电
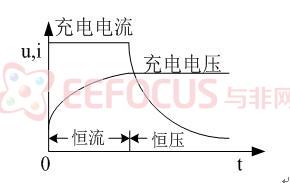
(4)恒流恒压充电
在上述两种充电方式的基础上,充电通过恒定电流开始。在恒流充电周期中,为了防止过度充电而不断监视电池端电压。当电压达到设定的端电压时,电路切换为恒定电压充电,直到把电池充满为止。在恒流充电期间,电池可以以较高电流强度进行充电,这期间电池被充电到大约85%的容量,电压以较高的斜率增长,在充电过程中斜率逐渐降低。在恒压周期中,电池电压恒定,充电电流逐渐下降,在电流下降到低于电池的1/10容量时,充电周期完成,又称为二阶段式充电法。恒流恒压充电曲线如图7所示。
图7 恒流恒压充电
三、系统设计及方案论证
1、总体设计
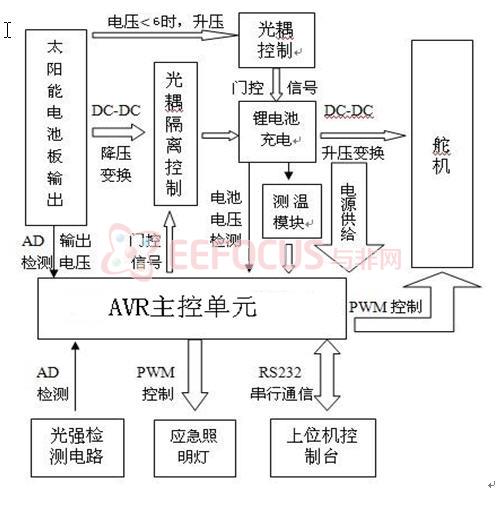
系统框图如图8所示。
图8系统框图
本系统设计主要有追光控制、电压转换、光耦开关控制、充电控制、照明灯控制和上位机界面控制六个部分组成,以追光及充电作为本系统的核心。追光控制采用光电跟踪与视日运动轨迹跟踪配合的方法。充电部分采用可用太阳能电池供电的CN3063充电管理芯片,并结合温度检测,光耦等控制,实现了智能充电的功能,并能有效的保护锂电池,活化锂电池,提升锂电池的性能。基于太阳能电池板输出电压的变化,考虑选择了升/降压电路,以获得最佳的充电调节。在照明灯状态控制部分,使用光敏电阻来检测外界光线强弱,以控制照明灯的亮灭,并使用PWM(脉宽调制)调节照明灯的亮度。上位机控制台用于观察太阳能电池输出电压,锂电池端电压,锂电池温度,并提供了人工控制功能,智能化的同时实现了人工管理。
2、详细设计
(1)锂电池及太阳能电池选择
①锂电池选择
基于安全、轻薄和容量的考虑,我们采用的是4000mAh的聚合物锂电池、铝塑包装,有别于液态锂电池的金属外壳,一旦发生安全隐患,不会爆炸,只会鼓胀;重量轻,比钢壳液锂轻40%,比铝壳液锂轻20%;容量大,内阻小,比常规电池内阻要小,使得有效放电容量要比其它电池高;形状可定制,采用胶态电解质,具有更平稳的放电特性和更高的放电平台;工作电压高;能量密度高;循环寿命长;无记忆效应,自放电小,无污染。
适用范围:通讯设备(移动电话、网络电话、对讲机、蓝牙耳机),移动办公设备(笔记本计算机、PDA、便携式传真机、打印机),影像设备(数码相机、摄像机、移动DVD、移动电视、MP3、MP4),其它(手电筒、矿灯、玩具、航模)。
②太阳能电池选择
选择太阳能电池时,要综合考虑其材质,工艺,重量,光电转换效率,功率等。本系统采用的太阳能电池板参数如表1所示。
| 规格
| 110*134mm
| | 开路电压
| 9V
| | 短路电流
| 170mA
| | 功率
| 1.5W
| | 工艺
| 单晶硅层压工艺
|
<div style="clear:both;"> 睡眠模式
内部有睡眠状态比较器,当输入电压低于电池端电压加20mv时,充电器处于睡眠模式,只有当输入电压上升到电池端电压50mv以上时,充电器才离开睡眠模式,进入正常工作状态。
输入电压源限流模式
当CN3063输入电压源的电流输出能力小于所设置的充电电流时,器件内部的8位模拟-数字转换电路根据输入电压源的电流输出能力自动控制充电电流,此时实际充电电流可能小于所设置的充电电流,但是在满足施加在CN3063的第4管脚VIN的电压不低于最小工作电压4.35的前提下,能够使得充电电流最大化。在这种模式下用户不需要考虑最坏情况,只要根据输入电压源的最大电流输出能力设置充电电流就可以了,非常适合利用太阳能电池等电流输出能力有限的电压源对电池进行充电。
充电结束
在恒压充电状态,当施加在CN3063的第4管脚VIN的电压大于4.45V,并且当充电电流小于所设置的恒流充电电流的1/10时,充电周期结束。在输入电压源限流模式,即使充电电流小于所设置的恒流充电电流的1/10,充电也将继续,不会结束。这样可以保证即使在输入电压源的电流输出能力很微弱的情况下,也能为电池充电。
预充电状态
在充电周期的开始,如果电池电压Kelvin检测输入端(FB)的电压低于3V,充电器处于预充电状态,充电器以恒流充电模式充电电流的10%对电池进行充电。
电池电压Kelvin检测
CN3063有一个电池电压Kelvin检测输入端(FB),此管脚通过对芯片内部的精密电阻分压网络连接到恒压充电的误差放大器。FB管脚可以直接连接到电池的正极,这样可以有效避免电池正极和CN3063的第5管脚之间的寄生电阻(包括导线电阻,接触电阻等)对充电的影响。这些寄生电阻的存在会使充电器过早的进入恒压充电状态,延长充电时间,甚至使电池充不满,通过使用电池电压Kelvin检测可以解决这些问题。如果将此管脚悬空,那么CN3063一直处于预充电状态,充电电流为所设置的恒流充电电流的1/10。
设定恒流充电电流
在恒流模式,计算充电电流的公式为
其中,
 表示充电电流,单位为A。
表示ISET管脚到地的电阻,单位为欧姆。
表示充电电流,单位为A。
表示ISET管脚到地的电阻,单位为欧姆。
在本系统中,设置500mA的充电电流,因此,
=1800V/0.5A=3.6KΩ。
电池温度监测
为了防止电池温度过高或者过低对电池造成的损害,CN3063内部集成有电池温度监测电路。电池温度监测时通过测量TEMP管脚的电压实现的,当TEMP管脚的电压大于46%*VIN超过0.15秒时,芯片正常工作;如果TEMP管脚的电压小于46%*VIN超过0.15秒时,则CN3063认为电池的温度超出范围,充电将暂时停止,当TEMP管脚的电压又重新大于46%*VIN超过0.15秒时,充电会继续。
本系统中将TEMP管脚接到地,禁用电池温度监测功能,并以DS18B20作为替代,实时监测锂电池电压,方便观察。
再充电
当一个充电周期结束时,如果电池电压Kelvin检测输入端的电压低于再充电阀值时,CN3063自动开始一个新的充电周期。
恒流/恒压/恒温充电
采用恒流/恒压/恒温模式对电池充电,在恒流模式中,如果CN3063功耗过大,器件的结温接近115°C,放大器Tamp开始共工作,自动调整充电电流,使器件的结温保持在大约115°C。
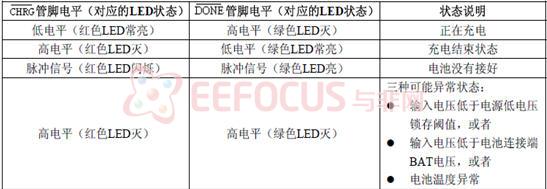
漏极开路状态指示输出端
有两个漏极开路状态指示端
和
,这两个状态指示端可以驱动发光二极管或单片机端口。用来指示充电状态,在充电时,为低电平;用来指示充电结束状态,当充电结束时,为低电平。当电池的温度处于正常温度范围之外超过0.15秒时,和管脚都输出高阻态。当电池没有接到充电器时,充电器很快将输出电容充电到恒压充电电压值,由于电池电压Kelvin检测输入端FB管脚的漏电流,FB管脚和BAT管脚的电压将慢慢下降到再充电阀值,这样在FB管脚和BAT管脚形成一个纹波电压为100mv的波形,同时输出脉冲信号表示没有安装电池。当电池连接端BAT管脚的外接电容4.7uF时,脉冲的周期大约为10Hz。系统中管脚接红色LED, 管脚接绿色LED。
表3列出了两个状态指示灯及其对应的充电状态。
表3状态指示灯与充电状态关系
(5)温度监测
方案一:采用热敏电阻做传感器件。热敏电阻与温度的变化是非线性的,而8位单片机的计算能力有限,在使用时,需摒弃复杂的计算公式,改用查表法算取温度。温度的精度值取决于AD采样精度,温度表格精度和热敏电阻精度。
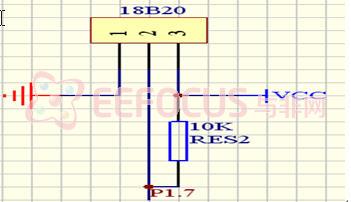
方案二:采用DS18B20温度传感器。使用时,只需编写严格的时序,即可直接读出温度值,低四位进行小数近似化处理,可以得到较为准确的温度值。
由于热敏电阻与温度的变化是非线性的,而且无法使用复杂的计算公式得出精准的温度值,我们采用方案二,当锂电池温度大于60°C时,停止充电。
DS18B20的应用电路如图15所示。
图15温度监测
(6)照明灯控制
方案一:通过检测光敏电阻阻值的大小,判断白天黑夜,并根剧光敏电阻阻值调节照明灯亮度。
方案二:通过检测太阳能电池板输出电压,来判断白天黑夜,并进一步调节照明灯亮度。
比较两种方案,方案二中太阳能电池板输出电压不仅会受到外界光强的影响,还跟温度高低等其他因素有关系,为避免误判断,我们采用方案一,且方案一中,根据光敏电阻阻值大小,更易于使用脉宽调制(PWM)模拟DA功能。
应用电路如图16所示。
图16照明灯
当检测到外界光强低于阀值时,打开照明灯,并使用STC12C5A60S2单片机的一路PCA输出PWM波,模拟DA功能,程序如下:
void SetLed(uchar PWM_LOW)
{
CCON=0; //PCA控制寄存器初始化
CL=0; //PCA计数器低8位清零
CH=0; //PCA计数器高8位清零
CMOD=0X02; //模式设置
CCAP0H=CCAP0L=PWM_LOW; //将光敏电阻值送给PCA捕捉/比较寄存器
CCAPM0=0X42; //设置PCA工作模式
CR=1; //启动PCA计数器
}
rg0=GetADCResult(2); //光敏电阻值采集
if(rg0>=0xa0) //电阻值大于阀值时,调光
SetLed(rg0-0xa0);
else
SetLed(0); //否则,发送0,即关闭照明灯
(7)追光控制
方案一:采用双舵机,搭建舵机云台。此方法可以全方位的追光,但是在实际使用中,舵机存在“抢电”的现象,会给供电电压带来较大的波动,甚至会产生较强的抖动,不利于控制,也不利于电能的收集。
方案二:只采用一个舵机,并结合机械追光。经查阅资料,当太阳能电池板与地平面的角度和当地的维度相同时,光能利用率最大。本方案中利用的机械部件,可人为的调节太阳能电池板与地平面的角度,再通过控制伺服舵机实现追光。
通过比较,我们选用方案二。方案二更节约电能,同时,在太阳能电池板的不同位置放置三个光敏电阻,利用光敏电阻对环境亮暗的敏感性设计寻找光源传感器,即光敏电阻和已知电阻的分压电路,采集光敏电阻端和已知电阻端电压,通过模拟量的电压分析,即可模糊地判断光线的强弱。与另两路寻光传感器电路中得到的电压值相比较,即可判断出光源的位置。利用单舵机机械结构实时把光源位置方向锁在正中间光敏电阻所对的方向。
图17光敏电阻检测
由于光敏电阻对环境的敏感性,导致环境中的散光造成的同一规格的光敏电阻在相同照度下电阻值不同。为此,在每个光敏电阻前加黑色筒状遮体,使光敏电阻的基准电阻值基本相同,为检测光源时三者电阻值的比较有统一标准,提高光源检测的精确度。
采集的电压值为模拟量,提高了光源检测的空间精度,模拟量亦可以作比较,赋相应的比例系数、微分系数代入舵机控制软件模块。光敏电阻检测光源电路图如图17所示。
在实际使用中发现,当出现外界干扰信号,供电电源的电压不足等情况时,会造成舵机抖动,所以我们采用独立的单片机和独立的电源完成追
光,避免了信号干扰和电压不足产生的抖动,同时,也避免了因舵机“抢电”造成的其他模块电压不稳定的问题。
独立电源来自锂电池,通过PT1301 IC芯片升压后供舵机使用,并且添加负载指示灯(蓝色)和锂电池电压过低报警指示灯(黄色)。详细资料请参见附录二。
其中,主要程序如下:
#define steer_center 60
#define right_limit 100
#define left_limit 20
#define KP 10 //比例系数
sbit pwm=P3^7;
uchar rg1,rg2,rg3;
uchar last_pwm_value_init; //上一次舵机输出值初始化
uchar control_pwm; //舵机PWM输出值
uchar last_control_pwm; //上一次舵机PWM输出值
void get_analog() //采集三路光敏电阻采光系统中的电压值
{
rg1=GetADCResult(0);
rg2=GetADCResult(1);
rg3=GetADCResult(2);
}
uchar analog_analyse()
{
get_analog();
if(last_pwm_value_init==0)
{
last_control_pwm=steer_center;
last_pwm_value_init=1; //初始化完成
}
if(rg2-rg1>0&&rg3>=rg2)
control_pwm=last_control_pwm-(rg2-rg1)*KP/80;
else if(rg2-rg3>0&&rg1>=rg2)
control_pwm=last_control_pwm+(rg2-rg3)*KP/80;
else if(rg1-rg2>0&&rg3-rg2>0)
{
if(rg2<80)
{
control_pwm=last_control_pwm;
}
//else //control_pwm=last_control_pwm+(rg1-rg2)*8/80-(rg3-rg2)*8/80; //也进行角度调节
}
else
control_pwm=steer_center;
if(control_pwm<=left_limit)
control_pwm=left_limit;
else if(control_pwm>=right_limit)
control_pwm=right_limit;
last_control_pwm=control_pwm; //保存上一次舵机输出值
return control_pwm;}
void main()
{
uchar PWM;
InitADC(); //AD初始化
Init_PCA(); //PCA扩展定时器初始化
while(1)
{
PWM=analog_analyse();
jd=PWM;
Delay(12);
}
}
void PCA_ISR()interrupt 7
{
CCF1=0;
CCAP1L=value;
CCAP1H=value>>8;
value+=25;
if(cnt <= jd) //判断0.025ms次数是否小于角度标识jd=20-100
pwm=1; //小于,PWM输出高电平
else
pwm=0; //大于则输出低电平
if (cnt>=800)
cnt=0;
else
cnt++; //0.025ms次数加1 ,次数始终保持为800 即保持周期为20ms
}
(8)主控单元
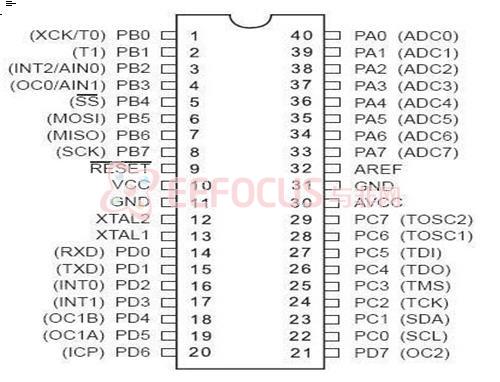
方案一:采用AVR 单片机 ,AVR单片机的I/O口是真正的I/O口,能正确反映I/O口输入/输出的真实情况。工业级产品,具有大电流(灌电流)10~40 mA,可直接驱动可控硅SCR或继电器,节省了外围驱动器件。
AVR单片机内带模拟比较器,I/O口可用作A/D转换,可组成廉价的A/D转换器。ATmega48/8/16等器件具有8路10位A/D。
部分AVR单片机可组成零外设元件单片机系统,使该类单片机无外加元器件即可工作,简单方便,成本又低。
图18 AVR MCU管脚分布
AVR单片机可重设启动复位,以提高单片机工作的可靠性。有看门狗定时器实行安全保护,可防止程序走乱(飞),提高了产品的抗干扰能力。AVR MCU管脚分布如图18所示。
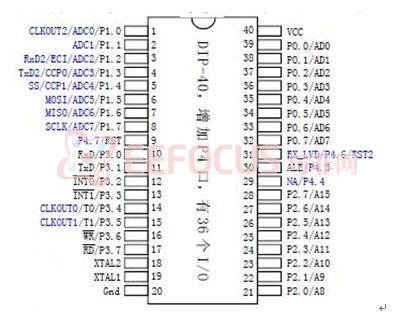
方案二:采用新一代增强型8051单片机STC12C5A60S2,此单片机具有两路PWM/PCA功能;8路10位A/D采集,转换速度25万次/秒;双串口;内部集成MAX810专用复位电路;具有60K的用户程序空间;内部集成掉电检测电路;可扩展为4个16位定时器;7路外部中断;工作频率范围为0-35MHZ,相当于普通8051的0-420MHZ;指令代码完全兼容传统的8051单片机。
综上两种方案,因所需的A/D检测通道较多,我们选用方案二中的STC12C5A60S2单片机作为主控芯片。
其管脚排列如图19所示。
图19 STC12C5A60S2管脚排列
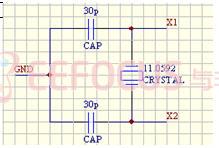
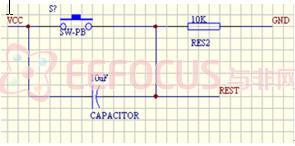
单片机的时钟电路和复位电路分别如图20和图21所示。
时钟电路:
图20 时钟电路
复位电路:
图21复位电路
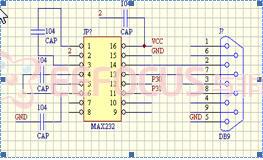
此外,系统需要与上位机进行通信,采用MAX232做电平转换,以使单片机的TTL电平和RS232协议的电平相同。
具体电路如图22所示。
图22 MAX232转串口 图23 RC滤波
在使用A/D功能时,为消除信号干扰,在P1口设计RC滤波电路,如图23所示。
4、软件流程
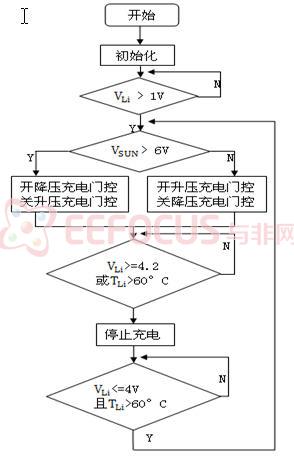
(1)充电管理
在此段程序中,首先连续三次检测锂电的电压是否大于1V,判断放入的锂电池是否有效。待判断成功后,检测太阳电池的输出电压,若电压大于6V,采用降压充电通道,并打开此通道的充电门控,关闭降压充电通道;若电压小于6V,采用升压充电通道,并打开降压充电通道的充电门控,关闭升压充电通道门控。当检测到锂电池电压大于等于4.2V时或锂电池温度大于60°C时,关闭所有充电通道。程序一直对锂电池电压进行检测,直到锂电池电压降到4V且温度小于60°C时,根据相应情况打开相应的充电通道。
具体的程序流程图如图24所示。
图24充电流程 图25串行通信流程
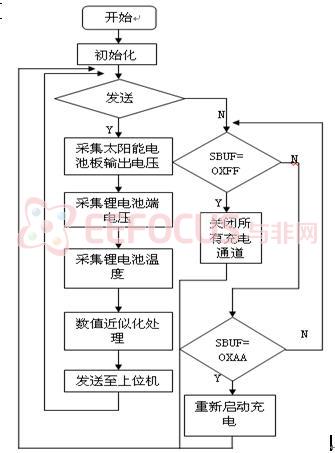
(2)串行通信
此段程序的主要任务是实现与上位机之间的通信。先进行判断是发送还是接收,若是发送,则将采集到的太阳能电池电压、锂电池电压、锂电池温度发送至上位机并在上位机界面上显示;若是接收,则需响应上位机发送的指令(0XAA为开始充电,0XFF为停止充电),并做出相应操作。
具体的程序流程图如图25所示。
(3)追光控制
此段程序用于实现太阳能电池板的实时追光。分别采集三个光敏电阻端和已知电阻端的电压,通过模拟量的电压分析,模糊地判断光线的强弱,并与另两路寻光传感器电路中得到的电压值相比较,判断出光源的位置,并将新的jd值赋给PCA捕捉/比较寄存器,产生新的PWM,调节舵机转动的角度,使太阳能电池始终对准光源。
具体的程序流程图如图26所示。
图26 追光流程
四、系统特色及创新
本系统的全部能量均来自太阳能,是顺应时代潮流的积极探索。通过光电转化后将电能存储到锂电池中,再给各个模块供电,可再生能源的使用响应了当下“和谐社会”的建设,为本系统提升了竞争力。
本系统解决了低电压无法工作的问题。我们添加了低压检测中断功能,当电压过低时,会触发中断,系统会保存重要的数据,当电压正常时,可恢复工作。同时,当没有光照时,系统靠存储在锂电池中的电能工作,我们也不用担心锂电池突然损坏的问题,因为当锂电池无法供电时,只要有光照,单片机仍可启动工作。
本系统提高了光电转换的效率。机械和舵机的配合追光,既考虑了舵机耗电的问题,也提高了光电转换率。机械追光利用的是当地地理位置的特点,将太阳能电池板与地平面成的角度和当地的纬度一致。例如,合肥当地的维度在32°左右,我们就将太阳能电池板与地平面的角度调节到32°左右,再通过舵机调节,配合追光。
需要说明的是,系统安装好后,此机械角度无需再次调节。
系统充分考虑了锂电池的特性及其充电要求。采用可太阳能供电的CN3063智能充电管理芯片,而且为锂电池安装了保护板,这些措施为锂电池的安全有效充电提供了保障;低压涓流充电的方式,能重新激活锂电池,正常电压情况下,恒流/恒压的充电方式更能安全快速的为锂电池充电,系统的“再充电”功能也防止了锂电池的过放;系统还设计了升/降压两路充电通道,以光耦器件作为开关,开关迅速而且不会产生电火花,通过程序的设计,自动切换充电通道;18B20温度检测的加入,能有效防止锂电池温度过高而损坏,为锂电池的安全提供了第二重保障。
系统中的照明灯改变了传统照明灯非开即关的特点。利用脉宽调制(PWM)模拟DA功能,实现了智能调光,当外界光线越弱时,照明灯越亮,当外界光线越强时,照明灯越暗,直至关闭,此方法的推广使用,会更节能。
VB上位机界面的设计,实现了人工智能化管理。在上位机界面上,可以直观的看到系统的运行情况,包括太阳能电池输出电压、锂电池电压、锂电池温度、锂电池电压变化曲线,如果系统运行出了故障,可以在上位机上加以控制,及时停止充电,避免了更大的损失。
本系统还有很大的提升空间。例如在经济许可的情况下,将有线传输改为无线传输,仍能实现通信;增大太阳能电池板的功率,使用锂电池电池组,添加逆变模块,可产生220V交流电,供小功率电器使用等等。
五、系统应用及展望
本系统可用于太阳能充电器,新型路灯,手电筒、玩具、航模。应用在通讯设备如移动电话、网络电话、对讲机、蓝牙耳机;移动办公设备如笔记本计算机、PDA、便携式传真机、打印机;影像设备如数码相机、摄像机、移动DVD、移动电视、MP3、MP4等。
鉴于此系统能有效的保护锂电池,活化锂电池,延长锂电池寿命,还可以考虑应用在信号发射塔上为锂电池组充电,能为通讯服务商节约更换锂电池组的成本。
根据系统追光特性,还可以将系统安装在屋顶,为家居用电提供可能;安装在电动汽车顶部,无论车子走到哪里,只要有太阳光,都会找到最佳位置吸光储能。
总之,该系统应用十分广泛,只要其工作环境有光源,用到锂电池,都可以考虑改装后使用,发展前景相当好。
附录一 锂电池保护板介绍
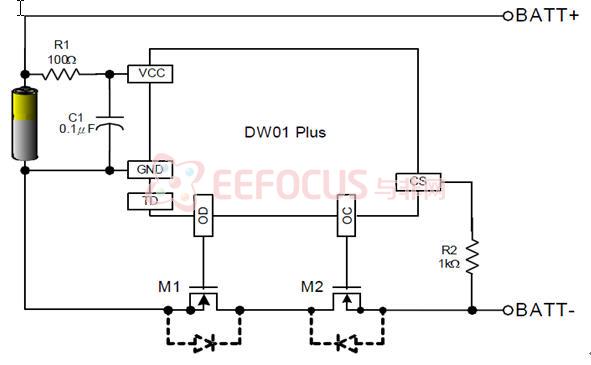
系统中使用的锂电池保护板采用的IC芯片是DW01+。DW01+是一个锂电池保护电路,为避免锂电池因过充电、过放电、电流过大导致电池寿命缩短或电池被损坏而设计的。它具有高精确度的电压检测与时间延迟电路。它的工作电流低,过充检测4.3V,过充释放4.05V;过放检测2.5V,过放释放3.0V;芯片内部有过了保护复位电阻,广泛应用于单节锂电池的保护电路DW01+的管脚排列如图27所示。
图27 DW01+管脚排列
DW01+是各管脚功能如表4所示。
表4DW01+管脚功能
DW01+的应用电路如图28所示。
图28 DW01+应用电路
附录二 PT1301升压、负载指示、低压报警指示介绍
1、PT1301升压
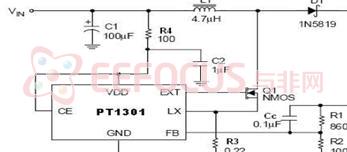
PT1301 是一款启动电压可低于1V的小尺寸高效率升压DC/DC转换器。采用自适应电流模式PWM控制环路,能在较宽的负载电流范围内稳定和高效的工作,并且不需要任何外部补偿电路;PT1301 内部含有 2A 功率开关,在锂电池供电时最大输出电流可达 300mA,同时 PT1301 还提供用于驱动外部功率器件(NMOS 或 NPN)的驱动端口,以便在应用需要更大负载电流时,扩展输出电流。14μA 的低静态电流,再加上高效率,可使电池使用更长时间,因此非常适合给舵机供电。
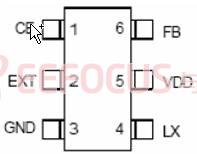
PT1301的管脚排列如图29所示
图29 PT1301管脚排列
PT1301各管脚功能如下表5所示。
表5 PT1301管脚功能
PT1301的典型应用电路如图30所示。
图30 PT1301应用电路
2、负载指示
负载指示灯的原理如图31所示。
图31负载指示
工作原理分析:当电源连接上负载时,指示灯就会亮,当负载所需的电流越大时,指示灯就会越亮;相反,当负载所需电流减小时,指示灯就会变暗。此电路用于观察舵机的用电情况。
3、低压报警指示
本系统具有锂电池低压报警指示功能,当锂电池电压低于3.3V时,报警指示灯就会亮,这里采用的是TP74芯片。
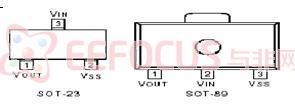
TP74是一款高精度、低功耗的电压检测器。芯片由基准电压产生器、电压取样电路、比较器及输出单元构成;可提供NMOS开漏和CMOS两种输出,用于1.5V-3.6V的电源电压的检测,可为大多数微处理器及数字系统电源提供电压检测。当输入电压低于预先设定值Vdf)时,reset信号启动直至输入电压恢复,电路重新工作。TP74的管脚排列如图32所示。
图32 TP74管脚排列
TP74个管脚功能如表6所示。
表6 TP74管脚功能描述
低压报警指示的原理如图33所示。
图33低压报警指示
工作原理分析:当输入电压Vin>3.3V时,输出电压Vout=Vin,此时,发光二极管两端电压相等,因此,当锂电池电压高于3.3V时,指示灯灭;若当输入电压Vin<3.3V时,输出电压Vout为零,此时,发光二极管两端有电压差,指示灯亮。 表7列出了使用过程中负载指示灯和低压报警指示灯的状态及含义。
表7 负载指示灯和低压报警指示灯的状态及含义
|
| 负载指示灯(蓝色)
| 锂电池低压报警指示灯(黄色)
| | 锂电池待机中
| 灭
| 灭
| | 锂电池使用中
| 亮
| 灭
| | 锂电池使用中且电池电压低
| 灭
| 亮
| | 锂电池待机中且电池电压低
| 灭
| 闪烁
|
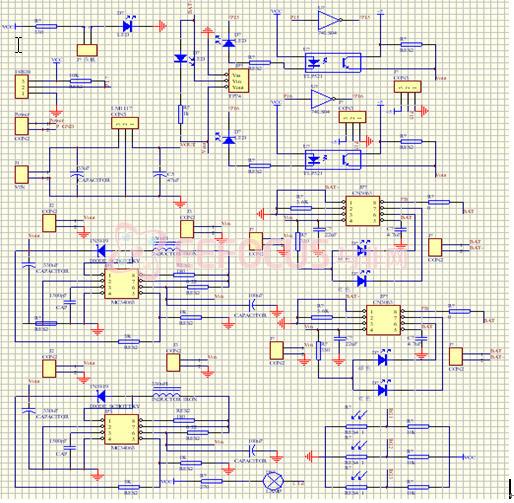
附录三 外围充电电路原理图
| 





 雷达卡
雷达卡
 发表于 2015-4-28 17:12:32
发表于 2015-4-28 17:12:32
















 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡 发表于 2020-10-5 14:33:51
发表于 2020-10-5 14:33:51
 {:12:}
{:12:}