一、项目概述
1.1 引言
交互式机器人小车主要是将语音的交互、视频的传送、动作的捕捉等功能结于一体,帮您实现视觉、听觉的拓展,无限缩短您与您家人的距离。它将采用具有超强的音频解码和流媒体处理能力的AT32UC3A0512作为核心;以Wi-Fi模块作为传输和控制的介质,从而有效保证媒体质量;用两驱三轮小车作为载体,充分确保小车定位与导航的灵活性。两块60mm*100mm左右的太阳能电池板,在阳光充足时可提供近2w左右的功率,让小车可以快速完成自动充电的过程。而自动寻光模块则解决了小车如何自动充电的问题,它主要由光敏传感器和微控制器中的蚁群算法构成,确保小车可以快速寻找到光源最充足的地方。
1.2 项目背景/选题动机
社会节奏越来越快,父母、孩子、工作似乎已很难兼顾,而我们的交互式机器人小车将为您排解这一忧虑。它可以让您无论身在何方都可与您的孩子进行互动式游戏;向您远在家乡的父母发出一声深情的问候;还可在家中巡视。当然现在家用机器人的安全问题已成为我们不得不面对的难题,我们的交互式机器人小车作为家用机器人中的一员,您可能也会发出它会不会泄露家庭隐私的疑问。在此我们不能保证绝对安全,但会为您构建专门的VPN通道,将我们的机器人小车的安全做到最好。同时在能源方面,我们设计的是太阳能充电和手动充电结合。在空闲模式时,机器人小车会自动寻光进行太阳能充电,这样可以基本省去您充电的麻烦。
二、需求分析
2.1 功能要求
①、对EVK1105上的USB进行设计,实现与常用免驱摄像头的直接连接,并从中完成高分辨率的视频图像的信息提取。
②、结合Wi-Fi模块和EVK1105板上的网络模块将我们的机器人小车连接到Internet上,当然在其中我们会申请VPN通道,从而确保信息的安全。
③、可以将视频和声音通过WiFi传到Internet上,同时可与对应客户端进行信息的传递。
④、可以实现即时语音通信,如QQ、MSN软件中的语言聊天
⑤、空闲时交互式机器人小车可以自动寻光,并利用太阳能电池板对电池充电
⑥、摄像头可以3自由度旋转,并实现互动式操作
⑦、小车可以自动定位和导航,自动躲避障碍,对障碍的盲区一般可控制到2cm范围以内。
⑧、当遇到撞击的情况,可通过振动传感器进行有效检测,再回到原位从新避过。
2.2 性能要求
充分利用EVK1105板上资源;可实现高清视频的获取及传送;可完成即时的语音交互,延时不超过1秒;可以直接越过3cm高的台阶;可以续航10小时,阳光充足时可实现6小时把电充满;铝合金打造坚不可摧,能承受高强度撞击。
三、方案设计
3.1 系统功能实现原理
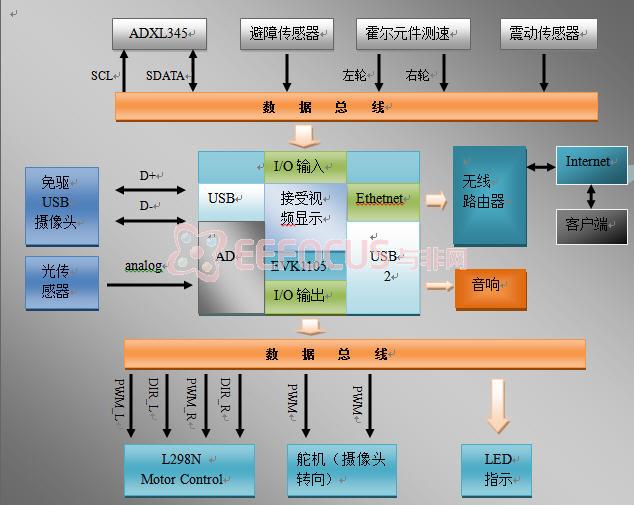
我们的交互式机器人小车主要可以分为EVK1105核心控制模块、Wi-Fi无线网络模块、传感器信号采集模块、视频语音采集模块、L298N电机驱动模块、太阳能充电模块和车体模型七大模块。具体系统硬件结构框图如下所示:
图(1):交互式小车系统结构框图
其中Wi-Fi网络模块我们暂时考虑用无线路由器再结合EVK1105上的网络服务模块来构建,暂不详述。下面将着重介绍传感器信号采集模块、视频语音采集模块、L298N电机驱动模块(包含舵机控制)、太阳能充电模块的基本原理:
3.1.1、传感器信号采集模块
在这一模块中我们主要用到了ADXL345三轴加速度传感器、避障用的红外光电传感器(经试验这样避障会产生较大盲区,如算法优化不成功我们可能会以超声波测距模块替换)、霍尔元件、震动传感器、光传感器。在这一模块中除装备了必要的传感器外,我们还将为它留下充足的传感器拓展口,以方便以后进行功能的拓展和一些性能方面的改进。
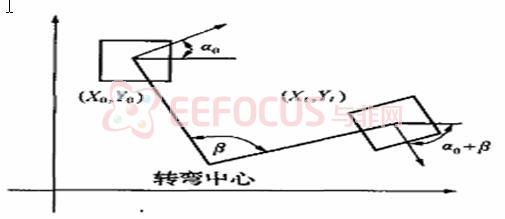
其中ADXL345是一款高精度数字式的三轴加速度传感器,它具有在16G下高分辨率(13Bit)测量能力,同时支持SPI和I2C通信方式。有了它便可有效的检测出小车的运动路径,还确保了机器人小车行驶过程中的平稳。具体模型如下:
设机器人的初始位置为( X 0,Y 0 ),对x 轴的初始偏角为α0 ,经过单位时间t 后机器人的位置 (Xt,Yt)为:
X=2Rsin(R/2)cos(α0 +β/2)+X0
Y=2Rsin(R/2)sin(α0 +β/2)+Y0

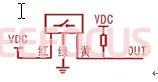
光电传感器用于对障碍的检测,它的有效检测距离可达30cm且不受光线强弱影响,具体连接如图(2)所示。小车的速度检测我们是通过霍尔元件来实现的,具体原理是在车轮加上强磁体,然后让MCU根据霍尔元件传会的脉冲定时,再结合车轮直径便可算出车速。震动传感器则用于检测车体是否发生碰撞。光传感器主要是为太阳能自动充电服务的,有点类似于一般的智能车自动寻找点亮的蜡烛并将其熄灭的过程。而我们的光传感器传回的主要是模拟信号,因此要先对其进行AD转换,再根据转换结果分析光的强弱。
3.1.2、视频语音采集模块
在本系统中我们暂时使用的是一般的免驱摄像头加CH374来获取的,但在EVK1105我们会考虑直接加驱动连接获取。对于语音的采集,虽然摄像头中内置了麦克风,但我们试验发现效果并不好,对于这一问题我们考虑用外置麦克风解决。
3.1.3、L298N电机驱动模块
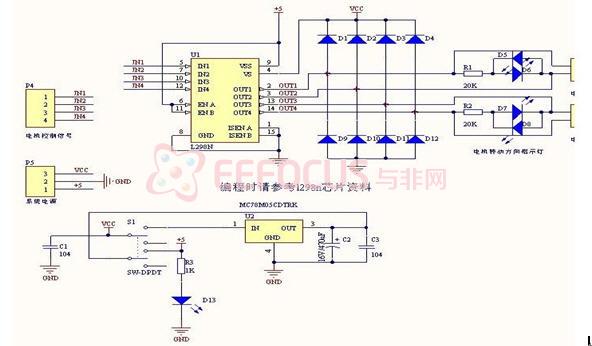
具体原理图如下所示。这一模块主要用对小车速度和方向的控制,MCU只要为其提供2路PWM信号和两路方向信号即可。
图(3):L298N电路原理图
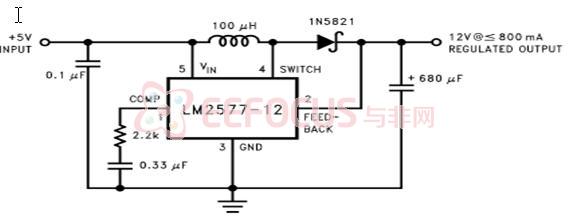
3.1.4、太阳能充电模块
这一模块我们主要用滴胶太阳能电池板和DC-DC升压电路来实现。具体原理图如下所示:
图(4):DC—DC升压电路
3.2 硬件平台选用及资源配置
由于考虑到本系统对视频和语音的要求比较高,因此我们选择具有强大的音频解码和流媒体处理能力的EVK1105硬件平台作为核心控制器,并且EVK1105在USB模块方面的配备和引导将为我们的设计提供极大的方便。在我们的交换式机器人小车中将EVK1105将作为一USB主机,通过相应USB驱动从摄像头中获取视频信号并由板上的液晶模块显示。同时USB还负责一个音响的控制,实现音频的播放。而我们的Wi-Fi模块主要依赖与EVK1105的网络拓展,通过EVK1105相关网络服务的引导,我们会构建一简单的Web Server,然后只需通过网络远程访问这个Web Server便可获取相关信息或对小车实行相应的控制。而我们的电机和舵机控制用的PWM信号将由AT32UC3A0512的相应I/O提供,传感器模块及其它相关输出操作则由普通I/O口完成。
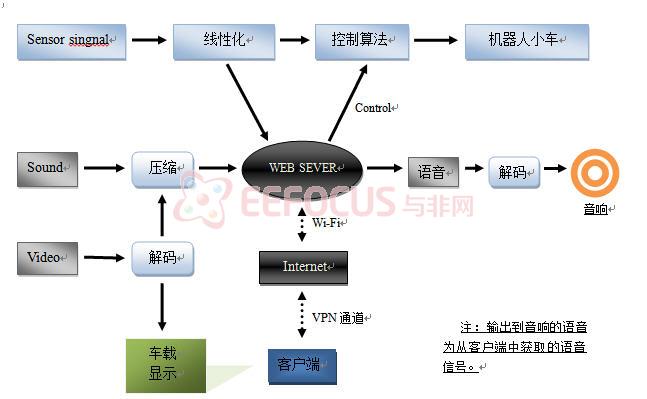
3.3系统软件架构
图(5):系统软件架构
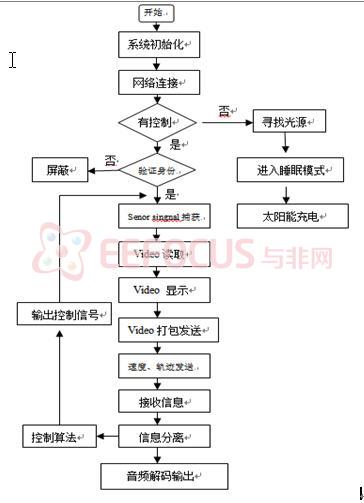
3.4 系统软件流程
从流程图中可以看出我们的机器人小车在空闲时会自动寻找光源,当找到充足的光源后它充电的同时会进入睡眠模式,这样可以把能源的消耗降到最低。如果在这时有控制申请,系统会以中断的方式唤醒AT32UC3A0512。在进行系统远程登录操作时首先要通过身份验证,同时为了保证信息的安全我们还会为其配备专门的VPN通道。验证通过后,系统则自动将检测到得信息先处理,在进行打包发送。在视频显示环节,EVK1105板上显示器要同步显示。当信息发送完毕后,系统自动检测接受缓存区是否有数据。如有则接受相应信号,并对其进行分离,具体如上流程图所示。
图(6):程序运行流程图
3.5 系统预计实现结果
在有网络的情况下,只需登录相应网页并通过身份验证,就可与机器人小车周围的人交谈。还可通过远程控制小车,观察小车周围的任意场景。小车的摄像头可以随着客户端鼠标的上下左右移动而一起移动,方便对任意角度的观察。控制时只需在接受的视频上移动鼠标点中想让小车到达的目的地,它便可自动到达。或者也可直接为它设置行进路径,就如一些游戏中目标的路径移动一样。在不对小车进行操作时,机器人小车会进入空闲模式。此时小车会根据时间判断是否自动寻找光源,当寻找到光源时小车则进入睡眠模式并进行充电。小车寻找目的地时可以自动辨别最优路径,在行进过程中如遇到障碍会自动躲避,如发生意外撞击则先归位再自行绕开。 | 





 雷达卡
雷达卡
 发表于 2015-4-29 08:07:11
发表于 2015-4-29 08:07:11

 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡 发表于 2020-10-2 11:02:37
发表于 2020-10-2 11:02:37
