|
|
一. 正文
(1)、项目摘要
交互式机器人小车是可以通过wifi实现数据的采集,视频监控等功能的智能控制平台。它集娱乐、现场勘测等于一体,采用了具有超强的音频解码和流媒体处理能力的AT32UC3A0512作为核心,在EVK1105开发平台上成功嵌入网页。并且实现无需插件或asp、php等语言,仅依靠html语言的交互式控制。交互式机器人小车还可以完成视频的动态监控,无需任何插件即可在网页查看相关媒体。小车的控制也是直接在网页上完成,无需任何软件。如手机上有wifi,经测试也可直接登录控制。而且在小车上增加相关传感器模块,还可直接把数据发到网页上,再结合浏览器插件便可将数据直接导入相关数据库或上传到internet。
(2)、硬件原理
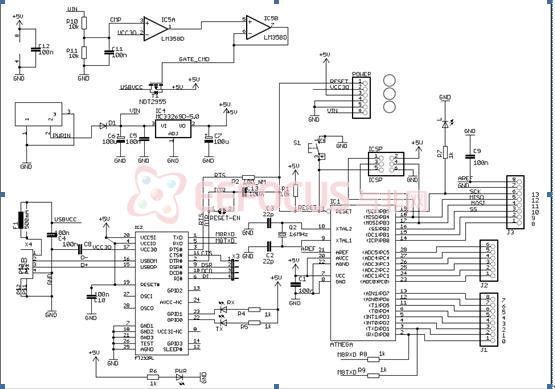
2.1 系统结构图
2.2、小车驱动模块
为了加强小车的野外数据采集能力,我们将小车设计为四驱结构并且全部采用360度舵机控制。这样虽然会降低小车的运行速度,但却让小车获得较大力矩和载重能力,使其在崎岖不平的草地上一样可以行动自如。在整个交互式机器人小车结构设计上我们一共采用了6个舵机:DS04-NFC 和 FUTABA3010。
DS04-NFC是360°舵机,主要用来驱动小车前进。它的控制信号是50HZ方波信号,一个高电平脉冲持续的时间对应一个速度。高电平为1毫秒~1.5毫秒时,舵机正转(1毫秒时正转速度最快,越接近1.5毫秒越慢,1.5毫秒时舵机停转),高电平为1.5毫秒~2毫秒时舵机反转(1.5毫秒时舵机停转,越接近2毫秒反转的速度越快,2毫秒时以最快的速度反转),转弯用差速控制。FUTABA3010则拥有摄像头云台,是180°舵机,根据所给PWM占空比不同可控制摄像头的左右转和上下转。
2.3 、Arduino控制板
在本次设计中我们采用了arduino328驱动电机,它主要是以Atmel的Atmega328作为核心,将MCU内部所有资源都编为开源的函数,可直接调用、查看、修改。具体原理图如下:
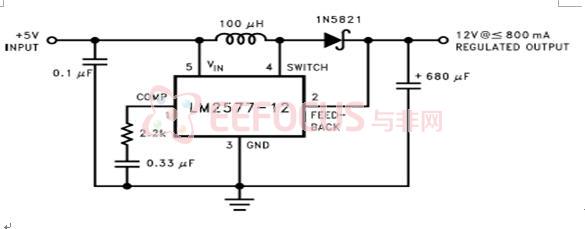
2.4、 DC-DC升压模块
这一模块主要是用于为无线路由器提供电源,具体电路如下:
图(4):DC—DC升压电路
(3)、软件架构
软件部分我们主要分为三块:无线路由加motion摄像头监控、EVK1105上的Websever、Arduino上的舵机驱动。
3.1 无线路由模块
在无线路由上我们嵌入了openwrt操作系统用于管理网络连接、自动拨号、wifi控制等。UVC摄像头我们也是挂在路由器上的,采用了motion做视频管理。具体编辑如下:
root@OpenWrt:~# opkg install motion
Installing motion (3.2.11.1-1) to root...
Downloading http://downloads.x-wrt.org/xwrt/backfire/10.03/brcm63xx/packages/motion_3.2.11.1-1_brcm63xx.ipk.
Installing libjpeg (6b-1) to root...
Downloading http://downloads.x-wrt.org/xwrt/backfire/10.03/brcm63xx/packages/libjpeg_6b-1_brcm63xx.ipk.
Configuring libjpeg.
Configuring motion.
root@OpenWrt:~# vi /overlay/etc/motion.conf
# Rename this distribution example file to motion.conf
#
# This config file was generated by motion "3.2.11.1"
############################################################
# Daemon
############################################################
# Start in daemon (background) mode and release terminal (default: off)
daemon off (on->off)
# File to store the process ID, also called pid file. (default: not defined)
process_id_file /var/run/motion/motion.pid
############################################################
# Basic Setup Mode
############################################################
# Start in Setup-Mode, daemon disabled. (default: off)
setup_mode off
###########################################################
# Capture device options
############################################################
# Videodevice to be used for capturing (default /dev/video0)
# for FreeBSD default is /dev/bktr0
videodevice /dev/video0
# Image width (pixels). Valid range: Camera dependent, default: 352
width 320 (视频宽)
# Image height (pixels). Valid range: Camera dependent, default: 288
height 240 (视频高)
# Motion Detection Settings:
############################################################
# Threshold for number of changed pixels in an image that
# triggers motion detection (default: 1500)
threshold 1500 (灵敏度调节)
# Automatically tune the threshold down if possible (default: off)
threshold_tune off
# Noise threshold for the motion detection (default: 32)
noise_level 32
# Automatically tune the noise threshold (default: on)
noise_tune on
# Live Webcam Server
############################################################
# The mini-http server listens to this port for requests (default: 0 = disabled)
webcam_port 8081 #远程端口
# Quality of the jpeg images produced (default: 50)
webcam_quality 50
# Output frames at 1 fps when no motion is detected and increase to the
# rate given by webcam_maxrate when motion is detected (default: off)
webcam_motion off
# Maximum framerate for webcam streams (default: 1)
webcam_maxrate 1
# Restrict webcam connections to localhost only (default: on)
webcam_localhost off
# Limits the number of images per connection (default: 0 = unlimited)
# Number can be defined by multiplying actual webcam rate by desired number of seconds
# Actual webcam rate is the smallest of the numbers framerate and webcam_maxrate
webcam_limit 0
target_dir /tmp/cam1 保存目录
############################################################
# HTTP Based Control
############################################################
# TCP/IP port for the http server to listen on (default: 0 = disabled)
control_port 8080
# Restrict control connections to localhost only (default: on)
control_localhost on
# Output for http server, select off to choose raw text plain (default: on)
control_html_output on
# Authentication for the http based control. Syntax username:password
# Default: not defined (Disabled)
; control_authentication username:password
##############################################################
# Thread config files - One for each camera.
# Except if only one camera - You only need this config file.
# If you have more than one camera you MUST define one thread
# config file for each camera in addition to this config file.
##############################################################
# Remember: If you have more than one camera you must have one
# thread file for each camera. E.g. 2 cameras requires 3 files:
# This motion.conf file AND thread1.conf and thread2.conf.
# Only put the options that are unique to each camera in the
# thread config files.
thread /etc/thread1.conf
thread /etc/thread2.conf
# thread /etc/thread3.conf
# thread /etc/thread4.conf
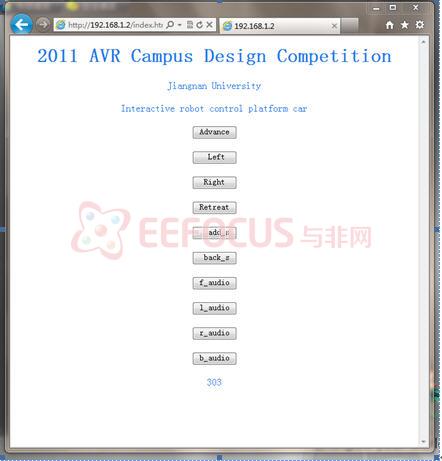
3.2 EVK1105模块
这一模块中我们主要是基于Lwip在Atmel公司的EVK1105开发平台上构建一个websever,完成人与车间的互动和数据的采集。具体界面如下:
下面是关于web的一段代码:
#if (HTTP_USED == 1)
/* Standard includes. */
#include <stdio.h>
#include <string.h>
#include "conf_eth.h"
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "partest.h"
#include "serial.h"
/* Demo includes. */
/* Demo app includes. */
#include "portmacro.h"
/* lwIP includes. */
#include "lwip/api.h"
#include "lwip/tcpip.h"
#include "lwip/memp.h"
#include "lwip/stats.h"
#include "netif/loopif.h"
/* ethernet includes */
#include "ethernet.h"
#include "gpio.h"
#define GPIO_PIN_EXAMPLE_1 0 //传输控制代码
#define GPIO_PIN_EXAMPLE_2 1
#define GPIO_PIN_EXAMPLE_3 29
#define GPIO_PIN_EXAMPLE_4 30
//#include "usart.h"
/*! The size of the buffer in which the dynamic WEB page is created. */
#define webMAX_PAGE_SIZE 3072
/*! Standard GET response. */
#define webHTTP_OK "HTTP/1.0 200 OK\r\nContent-type: text/html\r\n\r\n"
/*! The port on which we listen. */
#define webHTTP_PORT ( 80 )
/*! Delay on close error. */
#define webSHORT_DELAY ( 10 )
/*! Format of the dynamic page that is returned on each connection. */
/*!网页上按钮是用表单来构建的,不同的按钮发送不同的表单数值 */
#define webHTML_START \
"<html>\
<head>\
</head>\
<BODY onLoad=\"window.setTimeout("location.href='index.html'",1000)\" bgcolor=\"#FFFFFF\" text=\"#2477E6\">\
\r\n<center><p><h1>2011 AVR Campus Design Competition</h1></p>\
<center><p>Jiangnan University</p>\
<center><p>Interactive robot control platform car</p>\
<form name=\"input\" method=\"get\" action=\"1\">\
<input name=\"f\" type=\"text\"value=\"1\" style=\"display:none\" />\
<input type=\"submit\" name=\"X_0\" id=\"X_0\" value=\"Advance\" >\
</form>\
<form name=\"input\" method=\"get\" action=\"12\">\
<input name=\"f\" type=\"text\"value=\"2\" style=\"display:none\" />\
<input type=\"submit\" name=\"X_1\" id=\"X_1\" value=\" Left \" >\
</form>\
<form name=\"input\" method=\"get\" action=\"123\">\
<input name=\"f\" type=\"text\" value=\"3\" style=\"display:none\" />\
<input type=\"submit\" name=\"X_2\" id=\"X_2\" value=\" Right \" >\
</form>\
<form name=\"input\" method=\"get\" action=\"1234\">\
<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
<input type=\"submit\" name=\"X_3\" id=\"X_3\" value=\"Retreat\" >\
</form>\
\r\n<p><form name=\"input\" method=\"get\" action=\"12345\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_4\" id=\"X_4\" value=\" add_s\" >\
\r\n</form>\
\r\n <form name=\"input\" method=\"get\" action=\"123456\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_5\" id=\"X_5\" value=\" back_s\" >\
\r\n</form></p>\
<p><form name=\"input\" method=\"get\" action=\"1234567\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_6\" id=\"X_6\" value=\"f_audio\" >\
\r\n </form>\
\r\n <form name=\"input\" method=\"get\" action=\"12345678\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_7\" id=\"X_7\" value=\"l_audio\" >\
\r\n </form>\
\r\n <form name=\"input\" method=\"get\" action=\"123456789\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_8\" id=\"X_8\" value=\"r_audio\" >\
\r\n </form>\
\r\n <form name=\"input\" method=\"get\" action=\"1234567890\">\
\r\n<input name=\"f\" type=\"text\" value=\"4\" style=\"display:none\" />\
\r\n<input type=\"submit\" name=\"X_9\" id=\"X_9\" value=\"b_audio\" >\
\r\n </form></p>"
#define webHTML_END \
"\r\n</pre>\
\r\n</font></BODY>\
</html>"
portCHAR cDynamicPage[ webMAX_PAGE_SIZE ];
portCHAR cPageHits[ 11 ];
int f;
/*! Function to process the current connection */
static void prvweb_ParseHTMLRequest( struct netconn *pxNetCon );
/*! \brief WEB server main task
* check for incoming connection and process it
*
* \param pvParameters Input. Not Used.
*
*/
portTASK_FUNCTION( vBasicWEBServer, pvParameters )
{
struct netconn *pxHTTPListener, *pxNewConnection;
/* Create a new tcp connection handle */
pxHTTPListener = netconn_new( NETCONN_TCP );
netconn_bind(pxHTTPListener, NULL, webHTTP_PORT );
netconn_listen( pxHTTPListener );
/* Loop forever */
for( ;; )
{
/* Wait for a first connection. */
pxNewConnection = netconn_accept(pxHTTPListener);
vParTestSetLED(webCONN_LED, pdTRUE);
if(pxNewConnection != NULL)
{
prvweb_ParseHTMLRequest(pxNewConnection);
}/* end if new connection */
vParTestSetLED(webCONN_LED, pdFALSE);
} /* end infinite loop */
}
/*! \brief parse the incoming request
* parse the HTML request and send file
*
* \param pxNetCon Input. The netconn to use to send and receive data.
*
*/
static void prvweb_ParseHTMLRequest( struct netconn *pxNetCon )
{
struct netbuf *pxRxBuffer;
portCHAR *pcRxString;
unsigned portSHORT usLength;
static unsigned portLONG ulPageHits;
/* We expect to immediately get data. */
pxRxBuffer = netconn_recv( pxNetCon );
if( pxRxBuffer != NULL )
{
/* Where is the data? */
netbuf_data( pxRxBuffer, ( void * ) &pcRxString, &usLength );
/* Is this a GET? We don't handle anything else. */
if(( NULL != pcRxString )
&& ( !strncmp( pcRxString, "GET", 3 ) ))
{
/* Update the hit count. */
//ulPageHits++;addr
ulPageHits=pxRxBuffer->ptr->len;
//sendMessage("LwIP: DHCP Started");
//inet_ntoa(*(struct in_addr*)&(netif->ip_addr))
sprintf( cPageHits, "%d", (int)ulPageHits );
/* Write out the HTTP OK header. */
netconn_write( pxNetCon, webHTTP_OK, (u16_t) strlen( webHTTP_OK ), NETCONN_COPY );
/* Generate the dynamic page... First the page header. */
strcpy( cDynamicPage, webHTML_START );
/* ... Then the hit count... */
strcat( cDynamicPage, cPageHits );
//strcat( cDynamicPage, "<p><pre>Task State Priority Stack #<br>************************************************<br>" );
/* ... Then the list of tasks and their status... */
//vTaskList( ( signed portCHAR * ) cDynamicPage + strlen( cDynamicPage ) );
/* ... Finally the page footer. */
switch(ulPageHits)
{
case 310 :gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 311 :gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 312 :gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 313 :gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 314 :gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 315 :gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 316 :gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 317 :gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 318 :gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
case 319 :gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_clr_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
default: gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_1);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_2);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_3);
gpio_set_gpio_pin(GPIO_PIN_EXAMPLE_4);
break;
}
/*if(ulPageHits<310)
usart_putchar(EXAMPLE_USART, 0);
else if(ulPageHits<319)
{
f=ulPageHits-309;
usart_putchar(EXAMPLE_USART, f);
}
else if(ulPageHits==319)
usart_putchar(EXAMPLE_USART, 0x0a);
*/
/* Write out the dynamically generated page. */
netconn_write( pxNetCon, cDynamicPage, (u16_t) strlen( cDynamicPage ), NETCONN_COPY );
}
netbuf_delete( pxRxBuffer );
}
netconn_close( pxNetCon );
netconn_delete( pxNetCon );
}
#endif
(4)、实现功能
1、强大的越野能力,四路360°舵机强力驱动;
2、电脑、手机对小车的任意控制,无需任何插件、软件;
3、视频的同步监控;
4、数据的传输,可用于野外勘测、数据采集等方面;
5、可加载各种传感器,车上的控制单元都可在不拆卸的情况下直接下载升级。 |
|






 雷达卡
雷达卡
 发表于 2015-4-27 23:18:37
发表于 2015-4-27 23:18:37


 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡