|
|
作者:京微雅格应用开发部门总监 郑保夏
1 前言
新的科技与技术已经让现阶段工业机器人实现高精确度的水平。机器人的应用越来越广泛,需求越来越大,其技术研究与发展越来越深入,这将提高工业生产率与产品质量,为社会创造巨大的财富。工业机器人的发展历史工业机器人诞生于 20 世纪 60 年代, 20 世纪 90 年代得到迅速发展,现阶段最先进产业化的机器人是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的技术领域。它是为了适应制造业规模化生产,解决单调、重复的体力劳动和提高生产质量而代替人工作业而产生的。在我国工业机器人发展从初步使用阶段到目前自主开发阶段的转变,促进了我国制造业,勘探业等行业的发展。故工业机器人技术发展极为蓬勃与积极。
工业机器人是由操作机(机械本体) 、控制器、伺服驱动系统和检测传感装置构成;是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
京微雅格首创研发并已开始产业化的集FPGA/CPU/SRAM/ASIC/ADC/Flash为一体的“可定制可重构可编程”多功能高性能低成本可配置应用平台(CAP),在经济建设的各个领域具有广泛的应用,被誉为多种行业的“万能芯片”,完全符合工业机器人行业新的发展趋势。
又当CME 所独创的可配制应用平台(CAP)来成为控制核心,可提供工业机器人等这类需要多品种,变化大,又批量的可重复编程应用领域需求。
CAP架构于此平台上后可使工业机器人技术可实现于计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术运算控制。可应对环境状态的快速反应和分析判断能力,又可使机器持续工作、高精确度、强化抗恶劣环境的能力,从而达到上述要求的优点。
机器人技术是融合了许多学科的知识,国内已广泛把机器人制作比赛作为创新教育的战略性手段。”大学生机器人大赛”、“机器人相扑大会”、“机器人足球赛”等各种类型的机器人制作比赛,培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识。提升学生的开发技能水平,亦不乏众多科技界人士参与学习与研究开发。
基于CME的可配制应用平台(CAP)设计的机器人,实现了机器人的基本动作、路径跟踪、自动纠偏、拍摄影像、分析对象、探测环境、实时显示距离等高阶功能。
CME-M7可配制应用平台(CAP)是一款集成了更高级MCU内核和高性能FPGA的智能型芯片,通过将FPGA、CPU、SRAM、ASIC、Flash、ADC、LVDS、高速PHY以及模拟单元等功能模块集成在单一芯片上,CME-M7能够满足不同应用场合的“可定制可重构可编程”设计需求,实现了FPGA的SoC化。
CME-M7的FPGA部分采用高达12K容量的新型LP (Logic Parcel,逻辑包)结构,优化了FPGA与高级MCU内核的通信接口,客户可根据设计需求在FPGA上实现不同类型接口。同时,CME-M7的高级MCU内核结构基于FPGA应用也进行了优化,数据与程序空间均动态可调。
利用FPGA和CPU可定制可编程可擦写可重构的优势,实现一款核心产品同时满足不同行业应用,同类产品之间的差异化设计以提高竞争优势。
二、特性介绍与设计应用
• 实现了高性能MCU内核与大容量FPGA的无缝结合
内含192K Bytes 高速SRAM与外扩DDR I/II/III内存,并透过PBUS总线在内部衔接MCU外设与FPGA,在信息或取与数据运算之间透过FPGA做实时快速处理,并接续到MCU的高速运算,达到及时的控制要求
• FPGA逻辑单元高达12K
200 MHz最大频率,高达11520个4输入查找表,7680个DFF寄存器,144个EMB5K(4.5Kbit可配置双端口DPRAM存储器),可以充分可重复编程硬件,大容量高速度与强大重新编程重新配置能力,有效缩短产品上市时间与功能修正
• 更高等级处理器
300 MHz最大频率,1.25 DMIPS/MHz(Dhrystone 2.1)性能,单周期乘法指令和硬件除法指令,2个AHB主/从总线接口,可以在线调试模式,支持串行线调试接口(SWD)和JTAG接口
支持嵌入式Trace Macrocell™,’采用哈佛结构,1.25DMIPS/MHz和0.19Mw/MHz,Thumb-2指令集以16位的代码密度带来了32位的性能,内置快速的终端控制器,中断间的延迟时间降到只需6个CPU周期,从低功耗模式唤醒的时间只需6个CPU周期,与ARM7TDMI?相比运行速度最多可快35%且代码最多可节省45%
• 2个12位1MSPS ADC模块
可充分应用于环境侦测,动作位置定位感知,搭配于FPGA的逻辑单元,可以实现不经由MCU即可达到硬件运算修正的要求,实现实时高速运算控制要求
• 丰富的I/O资源与封装,以硬核形式整合以太网、USB、CAN、DMA控制器以及DDR控制器等外设
可以同时支持超过80组伺服电机控制,远超过一般MCU的控制极限,让每单元都独立运作,透过以太网、USB、CAN、 PCI,PCI-X可以实现对不同模块的通讯,甚至连接计算机与网络都不是问题
• 高精度PLL 及时钟网络
4个PLL,支持倍频、分频、相移、de-skew,8个外部时钟输入,1个外部晶体时钟输入,16个de-skew全局时钟,高精度的高速时钟源可以让内部时钟可以达到300MHZ的稳定运算
• 灵活的乘加器实现DSP
嵌入式DSP ,- 48个18x18或 96个12x9 DSP(MAC),可以组合成浮点运算器,丰富的乘累加器多达32组,可以让运算更简捷迅速与精确,机器人控制再也不需要额外DSP芯片即可达成
• 基于Efuse和AES的保密机制
配置讯息的可加密,难破解,让使用者的科研开发成果得以保持优势,进而保持产品价值优势
• 超高系统性价比
基于高度整合于单一芯片,有性能高 体积小 价格低的持续优势
CME-M7产品可应用在机器人控制中所需的核心如工业控制机器人、安防监控机器人、和家居机器人等领域。让机器人工能在设计上变得更简单又强大。
三、CME-M7硬件设计方案总成
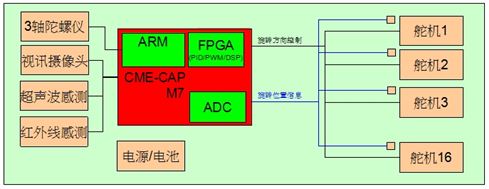
机器人总体构成
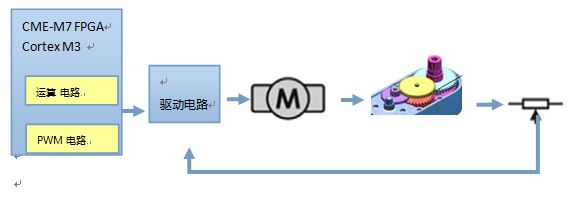
如图1所示,以CME-M7微处理器为核心,接受传感器传来外部信息,进行处理,控制机器人的运行。
图1 机器人总体构成
人型机器人的整体规划
人形机器人是一种智能化机器人,在机器的各活动关节配置有多达16个服务器,具有16个自由度,特显灵活,更能完成诸如手臂后摆90度的高难度动作。它还配一套设计优良的控制系统,通过自身智能编程软件便能自动地完成整套动作。
系统电源供电部分
由于机器人电机,传感器及系统采用+5V供电,CPU采用core 1V & I/O 3.3V供电,电源部分均考须虑电机功率和整体质量及摩擦阻力问题,电源我们采用锂电池组串联与同步降压处理,功耗小、体积小和质量轻,安装较为方便。
电机驱动及PWM调速部分
机器人需控制在一个合适的速度运行,速度快,因MCU对各传感器传来的信号有一个响应、处理时间,小车极易偏离轨道,此时需要搭配FPGA电路来实现实时运算处理后再提供给MCU。伺服的速度是由直流电机转速控制,经由级联减速齿轮进行降速后得到旋转与更大扭力,改变伺服齿轮的控制角度通常采用调脉宽、调压、调磁等方式来实现。其中,调压方式原理简单,但需要模拟输出, 调脉宽方式需要FPGA逻辑搭成PWM控制模块,在CME-M7容易实现。
可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,FPGA容易生成稳定且快速的脉宽调制信号的脉宽变换产生50Hz(周期是20ms)的信号,但须注意运放器件的选择有较高要求。
若只用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为 PWM信号输出到舵机,此时会因为单片机的指令周期不同与程序运行间隔不同而有不准确性,故采用CME-M7 FPGA PWM来直接控制,是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠,再由MCU下达参数给FPGA进行伺服的角度设置。

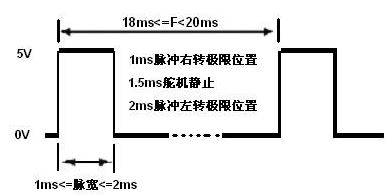
图示:舵机的控制要求
舵机是一种位置伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
当控制信号由输入缆线进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转电路。当电机位置与定位器不一致时,电机驱动芯片的正反转电路输出正反转讯号驱动电机,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机内安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
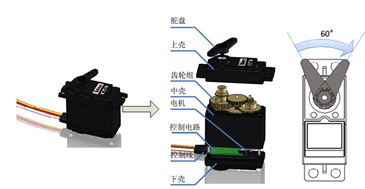
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机是一个微型的伺服控制系统,具体的控制原理可以用下图表示:
工作原理是控制电路接收信号源的控制脉冲,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
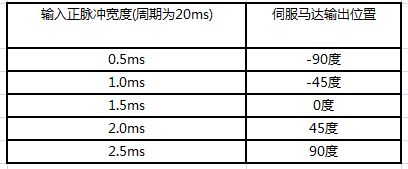
舵机的控制脉冲周期20ms,脉宽从0.5ms-2.5ms,分别对应-90度到+90度的位置。如下图所示:
利用CME-M7高性能硬件实现机器人的动态平衡,三轴传感器获得的姿态资料经过的FPGA与DSP直接运算后,传递给PWM生成控制讯号,達成即時控制要求。
|
|






 雷达卡
雷达卡
 发表于 2015-4-27 16:08:22
发表于 2015-4-27 16:08:22



 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡