|
|
第一作者:
刘忠,男,1978年8月生,长沙理工大学能源与动力工程学院教师,讲师,博士,毕业于华中科技大学水利水电工程专业,现从事水力机械状态监测与故障诊断研究。
主要作者:
邹淑云,女,1979年3月生,长沙理工大学能源与动力工程学院教师,讲师,硕士,现从事水电机组状态监测与故障诊断研究。
谢志聪,男,1987年1月生,长沙理工大学能源与动力工程学院在读硕士研究生,研究方向为动力机械故障诊断与振动控制。
水轮机空化的声发射信号检测应用
水轮机的空化将严重影响水电机组的出力、降低转轮和叶片的使用寿命。空化过程中形成的冲击振动信号中含有丰富频率成分的声波信号。中低频段容易受环境、水力、机械、电气等噪声的干扰,高频段信号则不存在上述问题。近年来,高频段的声发射信号越来越多地用于水轮机空化状态的检测。但对所采用的传感器、数据采集装置及后续分析处理提出了很高的要求。
本文提出采用声发射检测技术用于水轮机空化的检测与诊断,采用声华声发射传感器及前置放大器、凌华科技PCI-9846高分辨率数字化仪、以及工业控制计算机构建了以LabVIEW为平台的水轮机空化声发射信号监测系统。通过拾取20kHz~1MHz高频声发射信号,对该信号进行典型特征参数提取,确定这些参数的变化与空化状态的对应关系,为实现水轮机空化的状态监测与故障诊断提供技术依据与参考。
1 应用背景
随着我国能源政策的调整,水电在整个电网中的比重不断增加,水电机组运行的安全性与经济性日益受到重视。全面开展水电机组的状态监测与故障诊断,进而实施水电机组的“状态检修”已成为水电机组运行保障技术发展的必然趋势[1]。在水电机组状态监测与故障诊断的众多技术中,振动监测技术已经相对成熟,但是对于水轮机的空化与空蚀的识别则显得能力不足。据统计,目前我国水轮机的空化与空蚀已经成为水轮机损伤的主要原因之一,它会造成水轮机过流部件破坏加剧、运行不稳定,进而引起性能下降、运行效益低、检修费用大。空蚀损伤程度已成为决定是否进行大修的关键参数。因此,进行水轮机空化故障的状态监测与故障诊断研究,有助于判断水轮机空化是否发生,有助于了解空化故障的发展趋势,对于水轮发电机组的安全、高效、稳定运行具有重要的意义[2]。
2 面临问题
通过数值计算、统计、模型观测试验等方法,人们对空化空蚀产生的机理和外部表现形式有了一定的了解,在利用空化空蚀信号特征进行状态监测与故障诊断方面取得了大量的研究成果[3]。通常采用的方法有流量-扬程法、噪声法、压力脉动法、图像法等[4-7]。流量-扬程法简单方便,但是具有滞后性,无法诊断初始阶段的空化;噪声法利用振动传感器或声压计采集水轮机空化时产生的噪声,压力脉动法通过测试并分析水轮机过流通道压力脉动来判断是否发生空化,它们都容易受外界噪声干扰,灵敏度不高,传感器布置与安装受测量对象和运行环境限制;图像法直观,能实时监测,但是对流体介质的清洁程度、摄像装置以及后续处理提出了极高的要求。所以,在实际的水轮机空化监测应用研究中,它们的效果并不理想。
水轮机产生空化时,空泡溃灭产生的冲击波冲击水轮机过流部件的壁面,使壁面原子的晶格发生位错变形,并最终以弹性波的形式释放出猝发能量,从而产生频率范围在20kHz~1MHz的高频声发射信号声发射波,并通过水力、机械系统传播[8]。随着声测技术和计算技术的不断发展,通过测量和研究空化过程中气泡溃灭时产生的声发射信号作为判断空化是否发生及其发展程度的依据[9-11],已受到越来越多的关注。通过对声发射高频信号的提取与分析,既能克服低频信号的干扰,又有助于准确地诊断水轮机发生空化的位置和严重程度等[2]。当然,这也对采集高频信号的传感器、数据采集装置、分析处理方法提出了更高的要求。
3 解决方案
本文拟以LabVIEW 软件为开发平台设计出一套集声发射信号采集与数据处理于一体的、专门服务于水轮机空化状态监测的自动化系统。声发射传感器收集到的声发射信号前置放大器调理后经高速数据采集卡进入现场工控机系统。在LabVIEW 平台下实现水轮机空化状态声发射信号的数据采集、信号处理、状态显示等功能。整个系统的工作原理如图1所示。

图1 水轮机空化声发射信号监测系统工作原理图
3.1 硬件部分
(1) 声发射传感器
选用北京声华公司生产的SR-150M声发射传感器,如图2所示。该传感器由压电陶瓷材料制成,呈圆柱体,外表由不锈钢材料所包裹,采用磁吸附的方式固定于被测阀门阀体之上,安装使用方便简单、灵敏度高。SR-150M声发射传感器动态响应范围为60k~400kHz,中心频率150kHz,峰值灵敏度:> 65dB。
考虑到水轮机不同位置处的空化声信号特征可能会不同,将不同编号的传感器分别安装到几个有代表性的位置,如:活动导叶拐臂连杆上,转轮室外与桨叶裙边等高的位置,以及尾水管检修进人孔外等。
(2) 前置放大器
选用北京声华公司生产的PAI前置放大器。放大倍数为40dB,带通滤波范围为10KHz~ 2MHz,单端输入,工作电压为28V直流电压。
(3) 高速数据采集卡
选用凌华科技PCI-9846高速数字化仪,如图3所示。该高速数字化仪能够提供高精度、低噪音及高动态范围性能,高密度且高精准度,应用领域广泛。主要技术指标有:4通道同步单端模拟输入,最高采样频率为40MS/s,A/D分辨率为16位,输入范围为± 5 V 或 ± 1 V、带512M BSDRAM可供数据存储。
图2 声华公司生产的SR-150M声发射传感器
图3 凌华科技PCI-9846高速
数字化仪
(4) 工业控制计算机
选用的便携式工控机CPU为INTEL E5200,内存2G,14寸显示器。
3.2 软件部分
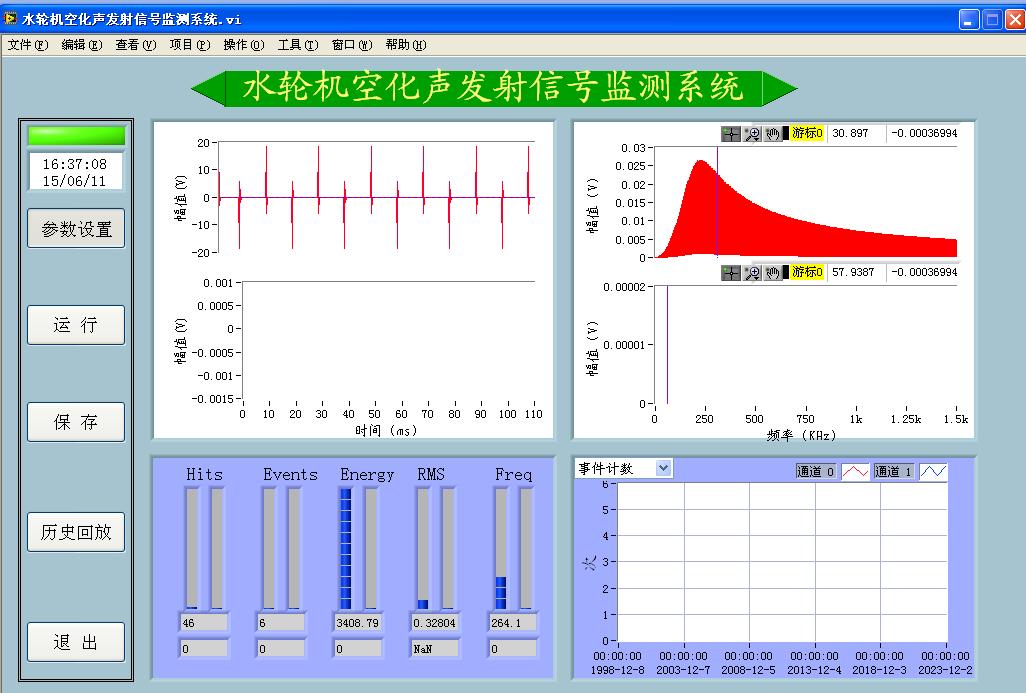
本文基于LabVIEW开发出的水轮机空化声发射信号监测系统软件主界面如图4所示。
图4 监测系统主界面
界面划分为功能选择区、时域波形显示区、频域波形显示区、空化声发射特征参数显示区和趋势分析显示区等。它们共同完成如下功能:
(1) 数据采集
采用硬件模块化的方式方便灵活地实现不同采样通道数目和采样频率的高速数据采集。
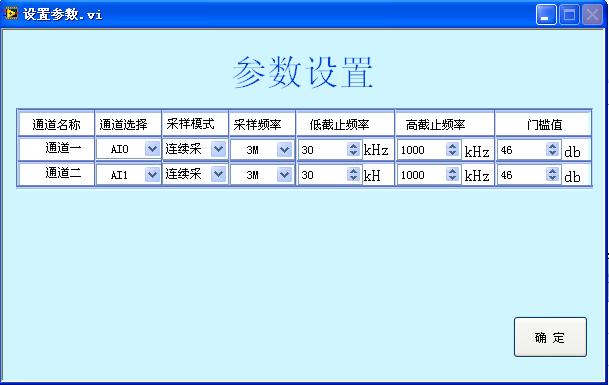
该模块使用了LabVIEW的NI Measurements模板中DAQmx 模块的各函数,根据不同需要可进行采集通道、采样模式、采样频率、采样频段范围、门槛值等设置。如图5所示。
图5 数据采集参数设置界面
(2) 信号处理
本模块利用LabVIEW 的Signal Processing Suite专用软件包、函数和子程序库,对采集到的传感器信号进行处理和分析,主要包括数字滤波、时域分析、频域分析、小波分析等。
经实验室环境下的反复对比测试,选定波击计数、事件计数、能量计数、RMS值和中心频率等5种参数作为空化声发射信号的特征参数。其中,波击计数(hits) 是一通道上一声发射信号的探测与测量和所测得波击个数,可以反映声发射活动的总量和频度。事件计数是由一个或几个波击鉴别所得声发射事件的个数。一般情况下一阵列中,一个或几个波击对应一个事件。它不仅可以反映声发射事件的总量,还可以反映声发射事件的频度。有效值电压(RMS) 是采样时间内信号电平的均方根值,以V表示。与声发射的大小有关。测量简便,不受门槛的影响。能量计数是事件信号检波包络线下的面积,可以反映事件的相对能量或强度,对门槛、工作频率和传播特性不甚敏感,可取代振铃计数,也用于波源的类型鉴别。
(3) 状态显示
状态监测以数值监测、图形监测、趋势监测等形式反映水轮机的空化状态。数值形式包括:振铃计数、事件计数、能量、RMS值和中心频率等。图形形式包括:空化声发射信号时域图、频谱图、声发射信号特征参数随时间变化的趋势图等。
(4) 数据存储
为了便于数据读取后进行后处理和管理的方便,本系统把采集到的数据通过数据文件的形式直接保存到指定路径下。文件名以数据采集的具体时间组合命名。数据分为实时数据和历史数据两种。实时数据主要有数据采集参数、声发射信号原始波形等。历史数据主要有按年、月、日等进行分档压缩存储的机组正常运转的历史数据和机组出现异常情况的历史数据,包括提取出的振铃计数、事件计数、能量、RMS值和中心频率等。这些数据既可用于历史数据回放和故障分析, 又可为水电机组优化运行提供依据。
4应用实例
尾水管空腔空化是反击式水轮机特有的一种漩涡空化,它发生在转轮下方的空腔区域。尤其是反击式水轮机偏离设计工况运行时,在转轮后会产生涡带,涡带中心形成负压,形成空化。同时,涡带会以低于水轮机转频的速度在尾水管中旋转,周期性地撞击尾水管壁,造成振动和噪声(其中就包括高频成分的声发射信号),也可能在尾水管进口段边壁引起空蚀。
本次试验选在某小型水电站的3#混流式水轮机上进行。该机组容量为8000kW,额定流量16.5m3/s,设计水头58 m。因投运于20世纪90年代,且缺乏必要的优化运行方案和检修措施,整个机组的稳定性状况较差,以往的检修也证明了尾水管中存在空腔空化与空蚀的破坏。因此,将2套声发射传感器分别布置在紧靠尾水管检修进人孔处和距离进人孔1.2m处,如图6所示。
图6 声发射传感器布置地点(某水电站尾水进人孔)
分别记录了从机组带40%、70%、100%负荷时的声发射信号及其特征参数。因满负荷运行时机组状态较平稳,声发射信号的各特征参数相对较小,可解释为水流运动以及撞击流道产生的噪声。而在带70%和40%负荷时,采集到的声发射信号及其特征参数变化明显,尤其是频谱中113kHz附近的频率成分随着所带负荷的减少而不断增加,而且试验人员在现场的震感较100%负荷时越加明显。表1列出了70%和40%负荷这两种工况下的声发射信号特征参数。
表1 不同工况下水轮机尾水空腔空化声发射信号特征参数对比
|
| 通道1
| 通道2
| | 参数
名称
| 事件计数
| 波击计数
| 能量率
| 中心
频率
| RMS
| 事件计数
| 波击计数
| 能量率
| 中心
频率
| RMS
| | 70%
负荷
| 144
| 3318
| 248.581
| 54.106
| 0.187
| 180
| 3570
| 188.35
| 52.589
| 0.16
| | 40%
负荷
| 181
| 5764
| 498.628
| 65.989
| 0.224
| 241
| 6545
| 423.167
| 68.704
| 0.194
|
从表中可以看出,40%负荷下的各项参数均比70%负荷时大,有些参数的变化幅度较大,如事件计数、波击计数、能量率等,说明前者的声发射现象比后者剧烈。这与低负荷工况下水轮机流态恶化、振动加剧、空腔空化严重的理论与实践结果是一致的,也在一定程度上反映了本文中开发出的系统在数据采集、特征参数提取上的合理性。
因为试验条件的限制,未能进行更多工况下的声发射信号采集,也由于整个行业内缺乏有关声发射特征选取的界定标准,所以有关声发射信号特征参数与水轮机空化发展程度的对应关系还有待进一步的系统的研究。
5结论
本文基于LabVIEW平台开发出了集数据采集与信号处理于一体的用于水轮机空化声发射信号监测的综合系统。凌华科技PCI-9846高速数字化仪在完成高速声发射信号采集方面发挥了重要的作用。从在某水电站现场应用的情况来看,采集并分析出的113kHz的高频成分的变化,反映了该电站中的水轮机在低负荷工况下空腔空化的存在。该结论在一定程度上证明了本系统在设计与实现上的合理性,以及在水轮机空化状态监测中的可行性。
参考文献
[1] 刘娟,潘罗平,桂中华,等. 国内水电机组状态监测和故障诊断技术现状. 大电机技术,2010,(2): 45-49.
[2] 王辉斌,吴长利,邹桂丽, 等.水轮机故障声学诊断技术研究及其应用探讨.大电机技术, 2010,(3): 45-50,54.
[3] Kumar P, Saini R P. Study of Cavitation in Hydro Turbines-A Review. Renewable and Sustainable Energy Reviews, 2010, 14(1): 374-383.
[4]徐朝晖,徐东海,吴玉林,陈乃祥,陈仁. 水泵与水轮机空化状态监测与诊断的研究进展. 农业机械学报, 2003, 34(1):139-142.
[5]M. Kaye. Cavitation Monitoring of Hydraulic Machines by Vibration Analysis. Southampton: University of Southampton, 2000.
[6] M. Dular, B. Bachert, B. Stoffel, B. Sirok, Relationship Between Cavitation Structures and Cavitation Damage, Wear, 2004,257 (11): 1176–1184.
[7] 蒋代君,陈次昌,张涛,伍超.水力机械表面空蚀程度的图像分析.水力发电学报,2009, 28(5): 221-224, 40.
[8] 张俊华,张伟,蒲中奇,林良有.轴流转桨式水轮机空化声信号特征研究. 大电机技术, 2006, (2):57-61.
[9] P. H. Hutton. Detecting Acoustic Emission in Presence of Hydraulic Noise. Non Destructive Testing, 1969, 2(2): 111-115.
[10] J. Z. Sikorska, D. Mba. Challenges and Obstacles in the Application of Acoustic Emission to Process Machinery. Proceedings of the Institution of Mechanical Engineers, Part E: Journal of Process Mechanical Engineering, 2008, 222(1): 2041-3009.
[11] 刘忠, 邹淑云, 晋风华, 谢志聪. 声发射技术在水电机组状态监测与故障诊断中的应用研究综述, 水利水电技术, 2011, 42(2): 49-51. |
|






 雷达卡
雷达卡
 发表于 2015-4-27 23:24:08
发表于 2015-4-27 23:24:08





 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡