一、项目概述
1.1 引言
电机是工业生产不可缺少的动力设备,电机的品种很多,作用也相当广泛。直线开关磁阻电机时一种新型的牵引电机。其主要有以下优点:结构简单,制作成本不高。工作稳定且能够在恶劣的环境下长时间正常工作,比如高温环境,开关磁阻电机有较好的散热性能,可以在高温下正常工作。随着电力电子技术的发展,开关磁阻电机控制将会变得更加容易并且控制效果更好。这种电机启动转矩大,过载能力强,调速范围广。直线开关磁阻电机除了具有以上优点以外,在一些需要做直线运动的场合,它显示出了强大的优越性:再也不需要像传统的做直线运动的装置那样,通过丝杆等传动装置将旋转的运动转化为直线运动。这样再一次的将中间环节给节省下来了,不仅降低了设备的成本,而且能量利用率也得到了提高。开关磁阻电机控制精度高,在高精度加工领域和大功率传输方面有广泛的应用前景。
1.2 项目背景/选题动机
现在有很多高精度加工平台需要直线运动的牵引机构,而目前的加工平台大部分都是利用旋转电机做牵引,再通过机械传动装置将运动形式转化为直线运动加以利用。这样不仅设备成本会很高,而且效率也不高。而直线开关磁阻电机本身的运动形式就是直线的,如果运用到这些设备上的话就会大大降低设备成本且效率也将会得到提高。
二、需求分析
本次设计大体分为四大部分:
(1)系统总体方案的设计,包括系统功能分析、系统架构的建立、系统硬件设计等过程。
(2)基于单片机A/D,D/A,PWM等资源的应用。
(3)电机模块的设计。
2.1 功能要求
(1)电流传感器
传感器负责采集直线电机电流以反馈给控制器进行处理。
(2)位置编码器
位置编码器将电机的运动的位置反馈给控制器处理。
(3)微控制器
微控制器负责处理传感器采集的电流、编码器反馈回来的位置。当位置指令给出以后,电机准确且迅速运动到指定位置。
(4)键盘模块
键盘模块负责给定输入。
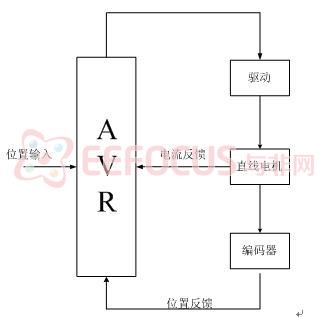
直线开关磁阻电机位置控制系统架构如图1所示。
图1 系统架构图
2.2 性能要求
(1)稳定性
该系统能够稳定的工作,抗干扰能力好。
(2)快速性和实时性
电机能够迅速的动作达到指定位置,达到实时控制的目的。
(3)准确性
电机能够准确的运动到指定位置。
三、方案设计
3.1 系统功能实现原理
系统主要分为5个部分,包括位置检测部分、电流采集部分、MCU控制部分、电机模块、按键输入给定位置部分。系统通过MCU的并口I/O一直检测各路传感器状态,按照给定输入值进行动作。
3.2 硬件平台选用及资源配置
MCU控制部分采用Atmel公司提供的一款基于AVR32 AT32UC3A单片机控制器的EVK1100模块。
3.3系统软件架构
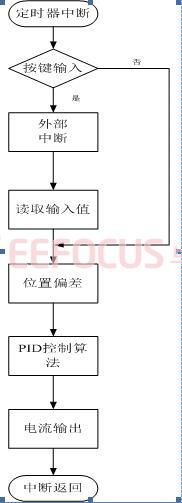
为了突出系统的实时性,软件设计按键输入的给定。值和编码器输入的位置都采用中断的方式来处理。具体软件流程图2和图3所示。
3.4 系统软件流程
图2 微控制器工作流程图
图3 中断子程序流程
3.5 系统预计实现结果
在电机的位置控制精度在1um级的前提下,尽量提高其位置控制精度。尝试各种高级算法(鲁棒控制、自适应以及模糊神经网络)在保证精度的前提下,达到实时控制。 | 





 雷达卡
雷达卡
 发表于 2015-4-27 23:24:08
发表于 2015-4-27 23:24:08


 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 微信
微信 收藏
收藏 分享
分享 支持
支持 反对
反对 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 抢沙发
抢沙发 千斤顶
千斤顶 显身卡
显身卡